Что такое Brake, Timing и PWM в регуляторе?
Опции темы
Что такое Brake, Timing и PWM в регуляторе?
Собственно все в теме написано.
Помогите разобраться, пожалуйста!
При программировании регулятора можно настроить следующее:

Что такое Brake разобрался, как и то, что лучше (для сохранности и долговечности мотора) им не пользоваться, или ставить Soft.
Но как выставить Timing Mode и PWM и на что они влияют не понял, даже прочитав пару статей. Ну далек я от электротехники. 
Поможите! Объясните, если можно.
Спасибо за разъяснения!
А вот с Timing Mode проблема. Его я точно сбил когда учился программировать контроллер. Не сразу понял что какой «биип» означает.
Спасибо за подробный ответ! Постараюсь настроить. Надо только раздобыть тахометр.
А статью Вашу уже читал, но она мне не очень помогла (дубоват я в электронике).
Subaru Tuning Guide (Часть 5. Тайминги. Начало)

Давно меня не слышно не видно, но это не значит что я сдулся, друзья 🙂 Долгое отсутствие продолжения связано с моими отъездами в командировки и труднопереводимостью материала(щас сами поймёте). Тайминги это наверно самая сложная и самая большая часть, поэтому разделю её на две. С первого раза не поймёте, гарантирую, поэтому советую перечитать несколько раз чтоб вникнуть.
Timing
ССЫЛКА
Большинство информации о том, как работает ECU, взято с Subaru’s knock control strategy explained (RomRaider)(конечно переведу, хотя там всё почти один в один) Я снова пересказываю её чтобы сделать легче для прочтения и добавляю информацию, которая, по моему мнению, поможет лучше понять общую картину.
Рассмотрим получше с помощью аналогии. Скажем у вас есть хрустальная ваза, приклеенная к скейтборду, и нужнозапустить её как можно дальше с помощью одного толчка. Если вы ударите по вазе, скейтборд никуда не сдвинется, а ваза разобьётся. Если вы будете толкать вазу плавно, скейтборд покатится далеко и ваза вместе с ним. Так что задача придать вазе как можно более сильный толчок, сохранив её в целости, чтобы скейтборд катился как можно дальше. Пинок здесь аналогичен детонации, в то время как толчок аналогичен нормальному горению смеси.
Чтобы извлечь максимальную мощность из двигателя, нам нужно чтобы максимальное давление в цилиндре приходилось на момент, когда поршень находится в 15 градусах после ВМТ(верхней мёртвой точки), или позиции 12 часов. Чтобы достичь этого, топливо-воздушная смесь поджигается раньше, обычно до достижения ВМТ. Это даст немного большее сжатие в ВМТ, что ускорит горение. Затем, после ВМТ, происходит основное горение, толкая поршень.
Когда мы настраиваем тайминг, мы устанавливаем количество градусов перед ВМТ, когда мы хотим чтобы свеча подожгла смесь. Чем больше опережение, тем скорее воспламенится смесь. Да, здесь многое может пойти не так. К счастью, система зажигания Субару достаточно продвинута/сложна, чтобы предотвратить катастрофу.
Еще одна короткая заметка о детонации. Датчик детонации это аудиодатчик. Это означает, что он в сущности прослушивает двигатель на предмет соответствующего звука. Двигатель является достаточно шумным местом, так что он отфильтровывает почти все звуки, кроме тех частот, которые характеризуют детонацию. Если кто-то уронит болт на заглушенный двигатель, сенсор этого не узнает. Но во время работы двигателя, звон падающего болта может создать звук в диапазоне детонации, и сенсор воспримет это как детонацию. Да, датчик детонации может сообщать о ложной детонации. Бывают случаи, когда датчик думает что машина постоянно детонирует как сумасшедшая. Это происходит нечасто и не означает что вы должны игнорировать сигнал датчика детонации. Это просто недостаток датчика детонации.
SUBARU KNOCK CONTROL(КОНТРОЛЬ ДЕТОНАЦИИ В СУБАРУ)
Вместо того, чтобы иметь одну таблицу таймингов, ECU имеет несколько, на основании которых вычисляется итоговое значение. Причина кроется в том, чтобы дать ECU возможность уменьшать или увеличивать тайминг, в зависимости от информации, получаемой от сенсоров, как например обратная связь по датчику детонации. Поэтому мы должны оценить различные параметры, на основании которых получим итоговое значение. Итоговое значение вычисляется следующим образом:
Total Timing = Base Timing + (IAM*Timing Advance) + Corrections + Compensations
Общий тайминг = Базовый тайминг + (IAM*Увеличение тайминга) + Корректировки + Компенсации
Base Timing: Значение в таблице Base Timing для определённых значений RPM/Load
IAM: Текущее значение ignition advanced multiplier(множитель опережения зажигания), записанное в оперативную память.
Timing Advance: Значение в таблице Timing Advance для определённых значений RPM/Load
Corrections: Значения, которые ECU выучило из прошлого опыта & обратной связи.
Compensations: Значения, полученные исходя из температуры входящего воздуха, атмосферного давления и т.д.
Давайте посмотрим откуда берётся каждый параметр и как они определяются. Base Timing берётся из таблицы base timing map в ecu. Тюнер имеет полный контроль над этой картой. Значение Timing Advance приходит из соответствующей карты, которую тюнер также вправе менять как хочет. Так зачем нужны две карты, если их значения добавляются вместе? Ответ кроется в значении IAM. Ignition Advanced Multiplier нужен чтобы добавить полный TA(timing advance) к base timing если двигатель в порядке, и только часть TA, если двигатель не в порядке. Двигатель в порядке это означает что ваш датчик детонации не фиксирует никакой детонации. Вы, как тюнер, можете очень просто поставить все нули в TA и сделать Base timing Value = Base Timing + Timing Advance. Это вовсе не будет проблемой если ваш двигатель всё еще в порядке, но безопаснее разделить эти значения. Они делятся как только у машины возникнут проблемы. В этом случае, ECU может уменьшить IAM и таким образом, добавив меньше TA, возможно спасти ваш двигатель.
IAM также известен как “Rough Correction”(«Грубая корректировка»). Это потому что он понижен, применяется только часть TA, и таким образом тайминг выходит за нормальные границы. Другими словами, это если машина детонирует при определённых комбинациях оборотов и нагрузки и IAM понижен, вы всё еще не получите полного TA пока не выйдите из «опасной зоны». Это должно быть лучший способ компенсировать детонацию, которая происходит в определённых местах.
Далее в действие вступают другие корректировки. Другие корректировки это Feedback Knock Correction (FBKC) и Fine Learning Knock Correction (FLKC). FBKC(Корректировка по обратной связи) Это корректировка тайминга, которая применяется когда вы в режиме WOT(wide open throttle или «тапку в пол» — нигде не нашёл перевод, догадался сам.), а FLKC(мягкая обучаемая корректировка) обычно применяется во время круиз-контроля(или спокойной езды по трассе без резких скачков газа). Давайте сначала посмотрим на наше изменённое уравнение.
TOTAL TIMING = BASE TIMING + (IAM*TIMING ADVANCE) + FBKC + FLKC + OTHER COMPENSATIONS
ОБЩИЙ ТАЙМИНГ = БАЗОВЫЙ ТАЙМИНГ + (IAM*УВЕЛИЧЕНИЕ ТАЙМИНГА) + FBKC + FLKC + ДРУГИЕ КОМПЕНСАЦИИ
КАК ECU ОПРЕДЕЛЯЕТ КОРРЕКТИРОВКИ?
Просто, ECU применяет одну форму коррекции во время сквозной дорожки и ошибки. Это значит что у нас три формы корректировки (FBKC, IAM и FKLC) и мы можем в один момент применить только одну. Так как это делается? ECU настроена на определённые параметры, которые диктуют, какую коррекцию ECU применит в данный момент. В основном, ECU большую часть времени применяет FLKC. Во время WOT(тапку в пол) или резких изменений нагрузки на двигатель, ECU отключает обучение FKLC и фокусируется на FBKC. Если ECU применяет FLKC и получаются большие корректировки (-4 градуса или более), ECU решает что это не хорошо и переключается в IAM correction. Это случается потому что ECU думает что с машиной что-то не так и выводит тайминг за нормальные границы чтобы спасти двигатель. Поэтому говорят что IAM это показатель того, насколько счастлив ECU.
Давайте попробуем собрать это всё вместе в алгоритм:
If (in IAM correction)
Если (в fine correction) Тогда
__Если (откатывается больше чем на 4 градуса или ECU не доволен) Тогда
____Переход к (IAM correction)
__КонецЕсли;
__Если (Большое/Быстрое изменение нагрузки на двигатель) Тогда
____Переход к (FBKC)
__КонецЕсли;
Иначе
__Проверка на соблюдение всех условий
__Остаться в FLKC correction mode
КонецЕсли;
Если (в IAM correction)
<Найти оптимальный IAM
Вернуться в FLKC mode>
ECU начинает с грубой корректировки. Это имеет смысл, т.к. оно ищет сначала оптимальный IAM, затем переходит к применению FLKC и остаётся в ней пока IAM не надо будет вычислить снова или вы не нажмёте резко на педаль. В другом случае ECU предпочтёт отдать приоритет FBKC. В таком случае начнём с этого(в следующей части).
Хватит пока, а то опасаюсь за ваши мозги 🙂 Свои-то почти поплавил…
Далее окончание про тайминги и немного про AVCS, а потооооом… секрет)
Про тайминг
Опции темы
Про тайминг
А посчитать количество магнитов нельзя? Или это инранер?
Если магниты на внешнем вращающемся барабане то это аутранер и такой тайминг пойдет.
Смотрите выше в этом разделе «Электромоторы» есть FAQ. Там все есть.
У меня есть ALIGN 400L. По конструкции они практически одинаковы.
У этих моторов статор 6-ти полюсный.
А из каких соображений нужно выставлять тайминг для бесколлекторника?
А у меня соответствующий вопрос по такому мотору CENTURY:
http://www2.towerhobbies.com/cgi-bin. &I=LXLKA0&P=V
Он инранер (магнит на роторе).
Купил регулятор Dualsky на 35А. По умолчанию стоит тайминг 4-10 градуса (для 12 полюсного).
Можно выбрать 10-20 (6-8 полюсного) и 20-30 (для 2-4 полюсного).
Двигатель заводится при любом выставлении таймингов.
насколько я знаю все наоборот, чем больше полюсов тем больше тайминг, для инраннеров чаще всего до 15гр, обычно 5-10гр, для оутраннеров до 30гр
И тем не менее данные цифры из технического описания по программированию DualSky TT35A
ошиблись значит, поскольку противоположное могу привести из описания хаскера и кастла
Я думаю все правильно в инструкции дуелскай. Чем больше полюсов, тем меньше допустим угол смещения между фазами регулятора и положением ротора.
Опережение (Timing) – параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
Что такое тайминг мотора
 Что такое регулятор (контроллер) скорости и для чего он нужен можно почерпнуть из предыдущей статьи про основные элементы радиоуправляемых моделей. А сегодня речь пойдет о типичных настройках регулей и способах их изменения.
Что такое регулятор (контроллер) скорости и для чего он нужен можно почерпнуть из предыдущей статьи про основные элементы радиоуправляемых моделей. А сегодня речь пойдет о типичных настройках регулей и способах их изменения.
Настройки регуляторов скорости
Это основные настройки. У некоторых специфичных моделей (особенно дорогих), могут быть и другие возможности настроек, которые обычно указываются в инструкции на регулятор.
Способы программирования регуляторов скорости
Вариантов программирования ESC несколько:
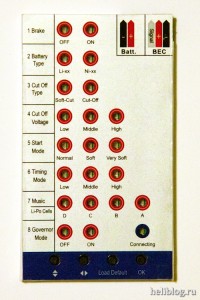
Программирование регулятора с помощью карты программирования
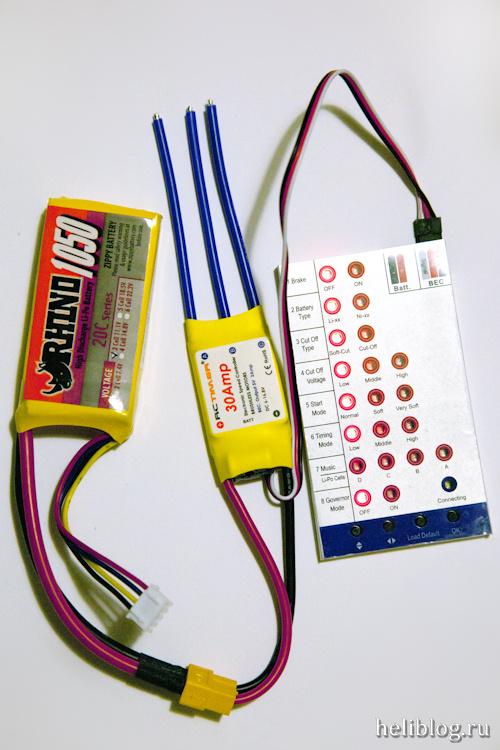
Покажу как программируется регулятор на примере карты для регуляторов Hobbywing, которая также подходит и к регуляторам RCtimer. Для регуляторов со встроенным стабилизатором достаточно просто подключить управляющий шлейф регулятора к разъему «BEC» на карте программирования, затем подключить к регулятору аккумулятор. Через несколько секунд на карте загораются лампочки и показывают текущие настройки.
 Программирование ESC со встроенным BEC
Программирование ESC со встроенным BEC
При программировании регуляторов без стабилизатора питания, или с отключенным проводом питания, необходимо подать на карту программирования питание со стороны. Это можно сделать, например, с приемника, или еще откуда-нибудь. Напряжение питания: 5-6 Вольт. Мне показалось удобней всего использовать для этих целей кассету под АА аккумуляторы с разъемом под приемник, вот эту. В остальном процесс ничем не отличается.
 Программирование ESC без стабилизатора питания
Программирование ESC без стабилизатора питания
Ну вот, про программирование ESC написал, теперь можно со спокойной совестью программировать свои 6 регуляторов для квадрика. 🙂
Настройки для регуляторов оборотов BLHeli_32
Обратите внимание, эти настройки актуальны только для регуляторов оборотов (ESC) BLHeli_32. С другими регуляторами не даются никакие гарантии.
Значение частоты PWM по умолчанию в BLHeli_32 установлено на 24KHz, при этом, если поднять частоту до 48KHz, то можно заметно повысить производительность полета на большинстве сборок.
При увеличении частоты, двигатели начинают работать более плавно, а также создают меньше шума. Некоторые пилоты утверждают, что моторы меньше греются, а аккумулятора хватает на более долгое время полета за счет бОльшей эффективности. Настройка заключается в том, насколько быстро будут переключаться MOSFET’ы в регуляторах оборотов, по простому — насколько быстро будут переключаться ключи. Подробнее о том, как работают регуляторы и что такое MOSFET:
Эти настройки никак не связаны с настройками полетного контроллера, все равно нужно настраивать сами регуляторы.
Motor Timing
Значение по умолчанию Motor Timing в BLHeli_32 равно 16. Это значение вполне подходит для большинства сборок, но мы предлагаем установить Motor Timing на «Auto», чтобы дать регуляторам возможность самим регулировать этот параметр при большом газе. Тем не менее, мы не заметили особой разницы между auto и 16, хотя может просто потратили мало времени на тестирование.
В любом случае, советуем вам попробовать поставить «Auto» и посмотреть на результат.
Протокол регуляторов оборотов
DShot — это один из новейших и современных протоколов для регуляторов оборотов, который пришел на замену Multishot. Но споры, что лучше — Multishot или DShot между пилотами все еще продолжаются и можно до сих пор встретить утверждения, что Мультишот лучше Дшот.
Несмотря на дебаты, DShot все же работает более интенсивно с процессором, чем Мультишот. По этой причине, некоторые остаются на Multishot, чтобы оставалась возможность использовать 32K/32K гироскопа, при этом сохраняя нагрузку на процессор на разумном уровне.
Наш совет — экспериментируйте!
В пользу DShot мы приведем несколько фактов:
Demag Compensation
Этот параметр может помочь уменьшить вероятность рассинхронизации. Если у вас нет этой проблемы, то оставьте значение по умолчанию, если проблема есть, то значение следует увеличить. Стоит уточнить, что если у вас нет проблем, а вы все равно увеличите значение — ничего не поменяется.
Rampup Power
Параметр Rampup Power (ударная мощность) ограничивает изменение мощности при внезапном увеличении газа.
Снижение Rampup Power уменьшает резкое увеличение тока, возникающее при резком увеличении газа. Недостатком будет то, что если вы установите параметр слишком низко, то это может привести к замедлению реакции двигателей.
Значение по умолчанию — хорошее значение. Я думаю, что параметр можно уменьшить, если у вас установлены специфические регуляторы оборотов и вы хотите защитить их от резких пиковых токов, которые могут возникнуть, если во время полета вы дадите полный газ и они от этого могут сгореть.
Current Protection
Этот параметр регулирует максимальный ток, который может пройти через регулятор оборотов.
Защита от высокого тока похожа на параметр Rampup Power, но этот параметр позволяет более точно контролировать ток.
Если вы не знаете, зачем вам этот параметр, то оставьте его выключенным (по умолчанию он выключен). Этот параметр можно использовать для защиты от потенциальной опасности для регуляторов оборотов: от перегорания из-за пиковых нагрузок, сбоев и рассинхронизации. Но если текущая мощность ваших регуляторов соответствует мощности моторов, вам не о чем беспокоиться.
Остальные параметры и настройки
Если для гоночного квадрокоптера, то оставьте остальные настройки и параметры по умолчанию. Многие из этих настроек предназначены для монокрыльев и самолетов.