Научная электронная библиотека
Пиралова О. Ф., Ведякин Ф. Ф.,
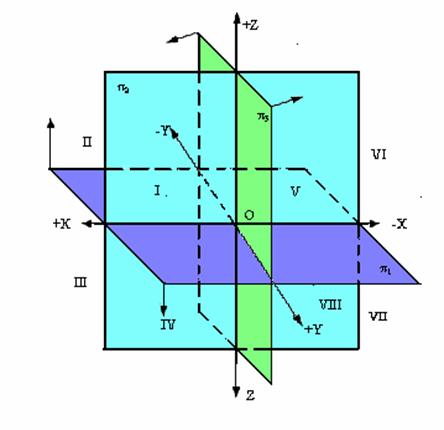
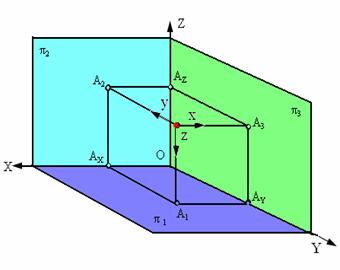
1.6. Система трех плоскостей проекций. Эпюр Монжа
Эти координатные плоскости обозначаются:
Линии пересечения этих плоскостей образуют координатные оси: ось абсцисс – Х; ось ординат – Y; ось аппликат – Z. Точка О пересечения координатных осей принимается за начало координат и обозначается буквой О. Положительными направлениями осей считают: для оси x − влево от начала координат, для оси Y − в сторону зрителя от плоскости π2, для оси z – вверх от плоскости π1; противоположные направления считают отрицательными.
 .
.
Рис. 1.12. Изображение системы трех плоскостей проекций
Для упрощения дальнейших рассуждений будем рассматривать только часть пространства, расположенную влево от профильной плоскости проекций π3.
При таком допущении три координатные плоскости проекций образуют четыре пространственных угла – октанта ( в общем случае – 8 октантов).
Оси ординат Y и аппликат Z делят профильную плоскость проекций π3 на четыре части:
Для того, чтобы получить плоскую (двухмерную) модель пространственных координатных плоскостей проекций, горизонтальную π1 и профильную π3 плоскости совмещают с фронтальной π2 в том порядке как это показано стрелками на рис. 1.12.
 .
.
Рис. 1.13. Пространственная модель точки А
При этом горизонтальная плоскость проекций π1 вращается вокруг оси Х на 90°, а профильная плоскость проекций π3 вращается вокруг оси Z также на 90° (направление вращения показано на рис. 1.12).
Полученное таким образом совмещение трех плоскостей проекций (рис. 1.13) является плоской моделью системы трех пространственных координатных плоскостей
Для построения плоской модели пространственной геометрической фигуры каждая ее точка проецируется ортогонально на плоскости проекций π1, π2 и π3, которые затем совмещаются в одну плоскость. Полученная таким образом плоская модель пространственной геометрической фигуры называется эпюром Монжа.
Порядок построения эпюры точки, расположенной в первом октанте.
На рис. 1.13 изображена пространственная точка А, координаты которой (x, y, z) показывают величины расстояний, на которые точка удалена от плоскостей проекций.
Для того чтобы получить ортогональные проекции точки А, необходимо из этой точки опустить перпендикуляры на плоскости проекций.
Точки пересечения этих перпендикуляров с плоскостями проекций образуют проекции точки А:
А1 – горизонтальную проекцию точки;
А2 – фронтальную проекцию точки;
А3 – профильную проекцию точки.
 .
.
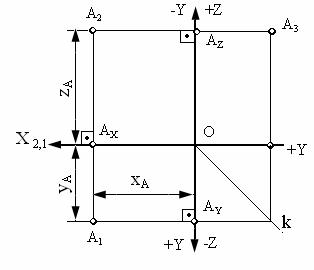
Рис. 1.14. Эпюр точки А
На рис. 1.14 плоскости проекций π1 и π3 совмещены с плоскостью чертежа ( с плоскостью проекции π2), а вместе с ними совмещены с плоскостью чертежа и проекции точки А (А1, А2, А3) и таким образом получена плоскостная модель координатных плоскостей проекций и плоскостная модель пространственной точки А – ее эпюра.
Положение проекций точки А на эпюре однозначно определяется ее тремя координатами (рис. 1.14).
На рис. 1.13 и рис. 1.14 также видно, что на эпюре горизонтальная и фронтальная проекции точки лежат на одном перпендикуляре к оси Х, а также фронтальная и профильная проекции – на одном перпендикуляре к оси Z:
А1А2  Х, А2А3 Z.
Х, А2А3 Z.
Из рис 1.12 видно, что точки, расположенные в различных октантах, имеют определенные знаки координат.
В таблице приведены знаки координат точек, расположенных в различных октантах
77. Взаимное расположение трех плоскостей
Пусть a, b и g три плоскости, заданные своими общими уравнениями в аффинной системе координат:

A12 + B12+ C12 ≠ 0, A22 + B22+ C22 ≠ 0, A32 + B32+ C32 ≠ 0. Рассмотрим систему трех уравнений
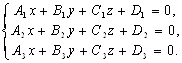 (5)
(5)

 .
.
Заметим, что rang A £ rang A¢ и ранги матриц A и A¢ могут отличаться только на единицу. Тогда возможны следующие случаи:
1. Rang A = Rang A¢ = 3. Тогда система (5) имеет единственное решение и плоскости a, b, g пересекаются в одной точке (см. Рис. 10).
2. Rang A = Rang A¢ = 2. Тогда система (5) имеет бесконечно много решений и плоскости a, b, g пересекаются по прямой. При этом, если строки матрицы непропорциональны, то среди плоскостей a, b, g нет совпадающих (см. рис 11). Если две строки матрицы пропорциональны, то соответствующие плоскости совпадают (см. Рис. 12).
3. Rang A = Rang A¢ = 1. Тогда система (5) имеет бесконечно много решений и плоскости a, b, g совпадают (см. рис 14).
4. Rang A =2, Rang A¢ = 3. Тогда система (5) не имеет решений. Если среди строк матрицы A нет пропорциональных, то все три плоскости пересекаются друг с другом и не пересекаются вместе (см. рис 15). Если две из строк матрицы A пропорциональны, то две из плоскостей параллельны и третья их пересекает (см. рис 16).
5. Rang A =1, Rang A¢ = 2. Тогда система (5) не имеет решений. Если среди строк матрицы A¢ есть пропорциональных, то все две плоскости совпадают друг с другом, а третья им параллельна (см. рис. 17). Если среди строк матрицы A¢ нет пропорциональных строк, то все три параллельны друг с другу (см. рис. 18).
Взаимное расположение трех плоскостей в пространстве
Три плоскости в пространстве могут располагаться так и только так, как показано в следующей таблице.
| Фигура | Рисунок | Свойство |
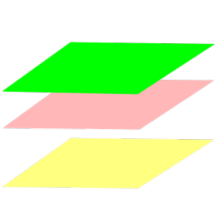
| Три параллельные плоскости |  | |
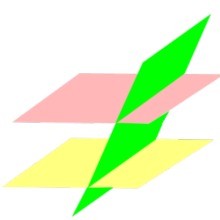
| Две параллельные плоскости, пересечённые третьей плоскостью | 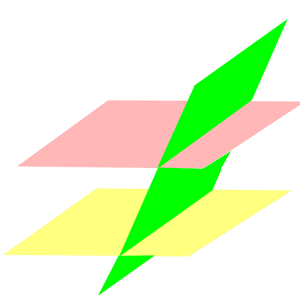 | |
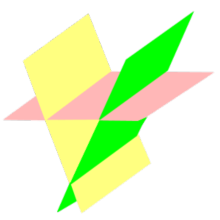
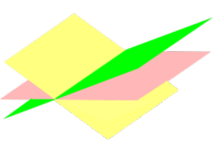
| Третья плоскость параллельна линии пересечения первых двух плоскостей | 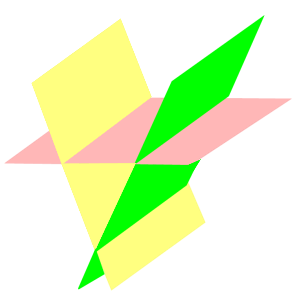 | |
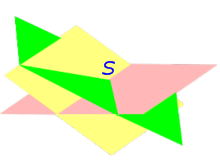
| Третья плоскость пересекает линию пересечения первых двух плоскостей | 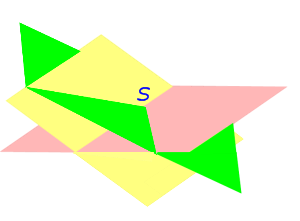 | |
| Третья плоскость проходит через линию пересечения первых двух плоскостей | 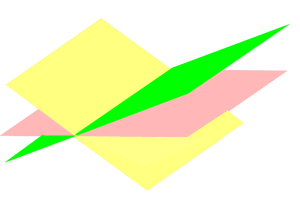 | |
| Третья плоскость проходит через линию пересечения первых двух плоскостей | ||
 и
и  заданы общими уравнениями
заданы общими уравнениями  и
и  .
. между векторами нормалей к ним
между векторами нормалей к ним и
и  .
. и из выражения в координатах длин векторов
и из выражения в координатах длин векторов  и
и  и их скалярного произведения получим
и их скалярного произведения получим
 .
. .
.
 , то коэффициенты пропорциональны, следовательно данные две плоскости параллельны.
, то коэффициенты пропорциональны, следовательно данные две плоскости параллельны. и
и  .
. и
и  нормалей к ним перпендикулярны и удовлетворяют условию равенства нулю их скалярного произведения. Так как
нормалей к ним перпендикулярны и удовлетворяют условию равенства нулю их скалярного произведения. Так как  , то указанное условие выполнено и, значит, данные плоскости перпендикулярны.
, то указанное условие выполнено и, значит, данные плоскости перпендикулярны.








 и плоскость
и плоскость  . Тогда уравнение плоскости, проходящей через данную точку, и параллельной данной плоскости, имеет вид
. Тогда уравнение плоскости, проходящей через данную точку, и параллельной данной плоскости, имеет вид .
.