Системы управления проектами
Формирование облика технического объекта

Важнейшие задачи этого этапа проектирования связаны с формированием концепции и облика объекта проектирования.
Под обликом технического объекта понимают его структуру и важнейшие параметры.
Конструктивные признаки (параметры) подразделяют на параметры формы (балансировочная схема, форма крыла, тип двигателей и др.) и параметры размерности (размах и площадь крыла, взлетная масса и др.)
При этом параметры формы задают «безразмерный» прототип самолета (т.е. параметризованный по размерности), размеры которого доопределяются последующими расчетами. Если параметры формы заданы однозначно, имеет место так называемое «проектирование от прототипа».
Таким образом, облик самолета характеризуется:
площадью крыла S (либо нагрузкой на крыло p0 = m0*g/S);
стартовой тягой двигателей R0 (либо тяговооруженностью r0 = R0/(m0*g)).
При этом схемные признаки характеризуют структуру и параметры формы самолета, а площадь крыла и тяга двигателей служат параметрами размерности.
О сайте

Система автоматизации проектных работ, или система автоматизированного проектирования, САПР (англ. CAD, Computer-Aided Design) — программный пакет, предназначенный для автоматизированного проектирования (CAD), разработки (CAE) и производства (CAM) конечного продукта, а также оформления конструкторской и/или технологической документации(PDM).
НАУКА и ОБРАЗОВАНИЕ

Россия, МГТУ им. Н.Э. Баумана
Введение
В настоящее время в мире военных автомобилей наблюдается всё большее разделение между тяжёлыми, хорошо защищенными боевыми бронированными машинами на колёсном ходу и сверхлегкими, высокомобильными багги. Конфликты в Ираке и Афганистане показали, что повышение бронезащиты внедорожников неизбежно ведет к потере ими возможности выполнять целый ряд разведывательных задач. В этой ситуации на помощь броневикам приходят лёгкие ударные автомобили с высокой манёвренностью, малой заметностью и относительно низкой стоимостью.
Условия эксплуатации машин в горных условиях весьма специфичны. Движение во многих случаях должно осуществляться по бездорожью с соответствующими требованиями по проходимости и маневренности. ОЛВКТС должно быть в состоянии преодолевать единичные препятствия в виде камней, пней, поваленных деревьев, а также иметь возможность передвигаться по лесу, по мари, по заболоченным участкам, преодолевать водные преграды [1].
Все это ставит задачу создания высоко-проходимого и маневренного транспортного средства относительно небольшой грузоподъемности, способного решать задачи в интересах специальных подразделений силовых структур Российской Федерации. К сожалению, такие машины отечественная промышленность не выпускает.
Попытки приспособить существующую технику для эксплуатации в специфических горных условиях не позволяют решать поставленных задач. Отсутствие научно-обоснованных методов формирования технического облика и прогнозирования перспективных значений определяющих параметров ОЛВКТС сдерживает развитие этого класса машин.
– неполноты или отсутствия знаний о поведении отдельных входящих в систему элементов и подсистем, а также взаимосвязей между ними;
– невозможности или ограниченной возможности экспериментального исследования процессов, не позволяющей получить достаточную статистическую информацию о наиболее важных характеристиках системы.
Для моделирования, проектирования и анализа таких организационно-технических систем получили распространение экспертные системы, оперирующие экспертными оценками, основанными на опыте и знаниях эксперта (или группы экспертов).
Основным математическим аппаратом формализации представления и обработки экспертных оценок и высказываний является теория нечетких множеств [2]. Применение аппарата нечеткого множества – это попытка математической формализации нечетких (экспертных) оценок в виде лингвистически поименованных функций для построения моделей обработки этих оценок как композиции указанных функций, имеющих простую лингвистическую интерпретацию. В результате появляется возможность для конечного пользователя оперировать естественными предметно-ориентированными лингвистическими термами, представляемыми на уровне компьютерных вычислений в виде чисел. Такой подход дает приближенные, но в то же время качественные способы описания поведения сложных и плохо определенных организационно-технических систем. Теоретические же основания данного подхода вполне точны и строги в математическом смысле и не являются сами по себе источником неопределенности. В каждом конкретном случае степень точности решения может быть согласована с требованиями задачи.
В последние десятилетия в нашей стране и за рубежом в самых различных отраслях производства разработаны и продолжают разрабатываться многочисленные методики по управлению качеством выпускаемой продукции на стадии проектирования, позволяющие обеспечивать получение изделий с оптимальными параметрами по критерию «цена – качество» [3].
Под качеством продукции будем понимать совокупность свойств продукции, обеспечивающий ее пригодность удовлетворять определенные потребности в соответствии с ее назначением [4].
Технический уровень продукции – относительная характеристика качества продукции, основанная на сопоставлении значений показателей, характеризующих техническое совершенство оцениваемой продукции с базовыми значениями соответствующих показателей [5].
Под техническим обликом будем понимать комплексную качественную и количественную характеристику объекта проектирования, отражающую наиболее общие и значимые признаки рассматриваемого объекта [3].
Технический облик транспортных средств формируется в процессе разработки технического предложения [6]. Этот этап играет особую роль в процессе проектирования машины, являясь одним из этапов НИР и занимая положение перед разработкой технического задания на эскизное проектирование. Цель процесса формирования технического облика – обоснование количественных значений основных определяющих параметров (ОП) проектируемого объекта.
В процессе формирования облика транспортного средства принимается более 70% решений по проекту [6], и от качества этих решений зависит возможность создания объекта в заданные сроки при ограниченном финансировании программы.
Блок-схема процесса формирования технического облика особо лёгких высокоподвижных колёсных транспортных средств
Исходными данными для формирования технического облика транспортных средств являются результаты анализа [6]:
· предполагаемых областей и условий использования объекта исходя из главного предназначения;
· современных и перспективных требований к эксплуатационным свойствам рассматриваемого класса транспортных средств;
· конструктивных решений возможных прототипов и основных тенденций развития мирового автомобилестроения по транспортным средствам соответствующего класса.
В настоящее время неизвестны алгоритмы прямого оптимального синтеза сложных технических объектов, и их разработка осуществляется многократным повторением анализа различных вариантов проектных альтернатив. Создание новых ОЛВКТС в этом отношении не является исключением.
В большинстве случаев решения задач формирования технического облика речь идет о процессах, не содержащих неопределенностей. Большинство реальных инженерных задач содержит в том или ином виде неопределенности [3], связанные с нечеткостью формулировок целей и задач, размытыми границами ограничений и т.п. Формирование технического облика семейства колесных машин представляет собой решение многопараметрической многокритериальной оптимизационной задачи с неполной информацией об объектах, что связано с отсутствием детальной конструкторской проработки узлов и агрегатов.
Однако, из-за наличия концептуальных и методических трудностей в настоящее время не существует единого методологического подхода к решению таких задач.
В литературе есть примеры решения вопросов оптимизации параметров конструкции на этапе проектирования при создании автомобильной техники. Например, вопросам оптимизации автомобилей многоцелевого назначения посвящена работа [3], транспортных средств особо большой грузоподъемности посвящен раздел в книге [6], подходы к оптимальному проектированию грузовых автомобилей рассмотрены в работе [7]. Технико-экономическим анализом проектируемых автомобилей, что также можно отнести к вопросам оптимизации, занимались авторы работ [8, 9].
Следует отметить, что вопросы оптимизации конструкции и вопросы оценки технического уровня объектов перекликаются между собой и при их решении зачастую используются одинаковые методы.
Блок-схема алгоритма процесса формирования технического облика особо лёгких высокоподвижных колёсных транспортных средств состоит из этапов, показанных на рис. 1. Рассмотрим эти этапы подробно.
На первом этапе определяются цели и задачи проектирования. Целью является определение оптимальных компоновки и тактико-технических характеристик особо лёгких высокоподвижных колёсных транспортных средств.
На втором этапе определяется номенклатура показателей, характеризующих технический уровень ОЛВКТС, а также ранжирование этих показателей по степени их влияния на технический облик. Ранжирование проводится с целью определения уровней значимости определяющих параметров.
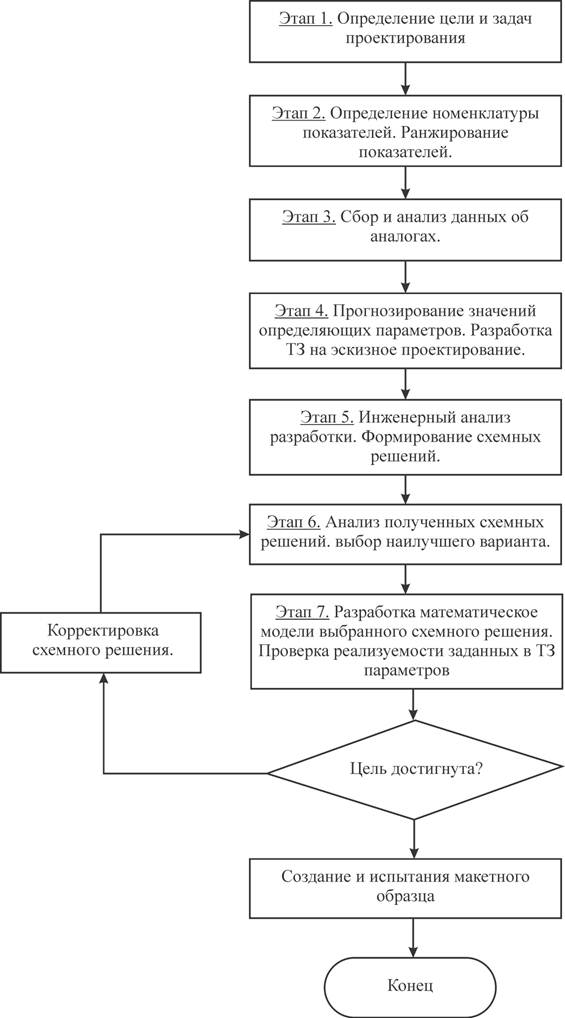
Рис. 1. Блок-схема процесса формирования технического облика ОЛВКТС
Основные трудности, возникающие на этом этапе разработки, заключаются в следующем:
· отсутствует четкая методика формирования номенклатуры критериев, характеризующие технический уровень ОЛВКТС;
· отсутствуют четкие границы, в которых должны находиться значения определяющих параметров;
· отсутствие методик четкого ранжирования параметров по степени их важности требует привлечения экспертных нечетких оценок;
· весьма ограниченный объем информации практически исключает возможность применения статистических методов обработки предварительной информации.
В реальной практике при формировании пунктов технического задания часто приходится сталкиваться со случаями, когда нет возможности количественного обоснования тех или иных показателей, и степень проявления того или иного свойства можно оценить только на качественном уровне, например, «высокий уровень», «средний уровень», «низкий уровень». В этих случаях для ранжирования показателей применяется экспертная оценка исходя из попарного сравнения рассматриваемых параметров [3].
Среди косвенных методов определения рангов наибольшее распространение получил метод парных сравнений Саати [10]. Особенность использования этого метода заключается в необходимости нахождения собственного вектора матрицы парных сравнений, которая задается с помощью специально предложенной шкалы. Для решения задачи ранжирования определяющих параметров необходимо разработать метод, позволяющий вычислять степени принадлежности элементов тому или иному нечеткому терму на базе матрицы парных сравнений профессора Саати.
Третий этап посвящен сбору и анализу данных об аналогах и формированию базы знаний о проектируемом классе ОЛВКТС. Аналоговая группа формируется из лучших зарубежных и отечественных образцов с глубиной проработки 10 лет [6]. На этом этапе решаются следующие задачи:
· определение достигнутого на сегодняшний день технического уровня;
· анализ тенденций изменения значений определяющих параметров.
Данный этап характеризуется следующими трудностями:
1) количество найденных аналогов, как правило, весьма ограничено;
2) численные значения определяющих параметров известны далеко не всегда и не в полном объеме.
В связи с этим невозможно проводить статистический анализ численных значений полученных характеристик и уж тем более осуществлять известными статистическими методами прогноз изменения этих параметров на перспективу [11].
Четвертый этап – прогнозирование значений определяющих параметров на перспективу 15-20 лет – срок, который в среднем проходит от начала разработки до утилизации первых серийных образцов [3]. Основной проблемой, возникающей на этом этапе, является то, что полученные значения определяющих параметров на предыдущем этапе не являются временным рядом в классическом понимании [12]. Поэтому никакие статистические и интеллектуальные методы прогнозирования значений определяющих параметров на перспективу неприменимы. С другой стороны, можно привлечь экспертов, которые могут оценить, каким должно быть значение определяющего параметра в «идеальном» случае. Однако, мнение экспертов в определенной степени носит субъективный характер. Единственная возможность – построение прогнозов на основе баланса мнений экспертов и объективных (пусть и малочисленных) данных об изменении значения данного параметра во временной перспективе методами нечеткой логики [13].
Результатом выполнения работ по этому этапу является обоснование количественных значений основных определяющих параметров в техническом задании на эскизное проектирование.
Пятый этап – проведение инженерного анализа разработки, формирование схемных решений, удовлетворяющих полученным значениям определяющих параметров, выполнение эскизного проекта. При этом решаются следующие задачи [6].
· Предварительное формирование облика машины, отвечающего требованиям технического задания. Формируется допустимая область существования проекта, где находится допустимое решение, описываемое параметрами начального приближения.
· Оптимизация проектных параметров ОЛВКТС по выбранному критерию с учетом ограничений, вытекающих из требований технического задания и действующих нормативных документов.
· Параметрический анализ, направленный на оценку чувствительности проекта к изменению его альтернатив (вариантов схемных решений), параметров и ограничений.
· Уточнение характеристик изделия и документирование результатов проектирования.
Шестой этап включает в себя работы по анализу полученных схемных решений по результатам эскизного проектирования и выбору оптимального варианта. На этом этапе возникают следующие проблемы.
В процессе принятия решения проводится многокритериальный анализ в условиях большого количества неопределенностей, когда цели и ограничения заданы нечеткими множествами. В данных условиях принятие решения – это выбор альтернативы, которая одновременно удовлетворяет и нечетким целям, и нечетким ограничениям. Решение задачи выбора оптимального схемного решения возможно с помощью теории принятия решений в нечетких условиях по схеме Беллмана-Заде на основе многокритериального анализа вариантов при равновесных и неравновесных критериях [2]. Веса критериев получают на основе парных сравнений [14].
Седьмой этап – разработка математических моделей создаваемого транспортного средства. Математическое моделирование позволяет провести всестороннее комплексное исследование выбранного схемного решения до создания натурного образца, что позволяет сэкономить время и средства, отпущенные на разработку.
Задача этапа состоит в подтверждении реализуемости заданных значений определяющих параметров.
Анализ горных условий эксплуатации особо лёгких высокоподвижных колёсных транспортных средств
Горные районы представляют собой труднопроходимую местность [3]. Если низкие (500 … 1000 м) горы, как правило, хорошо освоены, в них имеется развитая сеть дорог, то для средневысотных гор (1000 … 2000 м) характерны крутые, нередко покрытые лесом склоны, труднодоступные вне дорог для колесных машин. Дороги обычно проходят по долинам, ущельям, склонам и карнизам гор. Проезжая часть дорог покрыта в основном каменистым грунтом. Проходимость таких дорог резко меняется в зависимости от времени года и погодных условий.
Характерной особенностью горных и предгорных районов является широкое распространение грунтов, содержащих каменные материалы различных фракций, в том числе и такие, которые представляют собой профильные препятствия для движения транспортного средства [1]. В этих условиях любое транспортное средство должно обладать высокими параметрами профильной проходимости. Также в связи с наличием на опорной поверхности валунов и большого количества абразивных материалов в работе [1] делается вывод о предпочтительном использовании колесного движителя перед гусеничным, т.к. последний имеет более низкую надежность при движении по указанным поверхностям.
Для обеспечения эффективного использования ОЛВКТС в горных условиях машины должны быть способны преодолевать подъемы крутизной не менее 30 0 и устойчиво передвигаться по косогорам до 20 0 [3].
В горных условиях двигатели работают преимущественно на неустановившихся режимах, при этом снижаются их эффективные показатели по сравнению со сходственными установившимися режимами, возрастает дымность и токсичность выбросов, снижается моторесурс, повышается расход топлива. В горных условиях эксплуатации, особенно на затяжных спусках с большим числом поворотов малых радиусов, наблюдается длительное использование двигателя в качестве тормоза. Однако ввиду малого тормозного момента, развиваемого двигателем, приходится длительное время использовать и рабочие тормоза, что сопровождается их перегревом и снижением эффективности работы, которые зачастую приводят к полным их отказам [15].
В горных условиях значения температуры окружающего воздуха изменяется в зависимости от высоты над уровнем моря. Так, для высоты 2000 … 3500 м над уровнем моря интервал изменения средней температуры находится в пределах 7 … 27 0 С. Это приводит к снижению плотности воздушного заряда, поступающего в цилиндры двигателя, в связи с чем ухудшается наполнение цилиндров свежим зарядом и уменьшается коэффициент избытка воздуха, в результате чего ухудшаются основные показатели работы двигателя. А на неустановившихся режимах работы двигателя, характерных для горных условий эксплуатации, снижение мощности составляет около 20 %.
Разработка отечественных особо лёгких высокоподвижных колёсных транспортных средств позволит расширить возможности сил быстрого реагирования и возможности применения войск специального назначения в условиях горной пересечённой местности. На данные транспортные средства возможно возложение следующих задач:
— разведка и скрытое наблюдение;
— лазерного целеуказания высокоточным боеприпасам;
— проведение рейдов и поисково-спасательных операций, в том числе и в тылу противника;
— ведение радиоэлектронной борьбы.
Отсутствие бронезащиты должны будут компенсировать подвижность (за счет высокой удельной мощности двигателя, длинноходной подвески колес, малого удельного давления на опорную поверхность) и малая заметность, которую обеспечат низкие силуэт и виброакустическое излучение.
Обоснование выбора номенклатуры показателей, определяющих технический облик особо лёгких высокоподвижных колёсных транспортных средств для горных условий эксплуатации
Обоснованию выбора номенклатуры определяющих показателей вновь создаваемых колесных машин посвящено большое количество работ [3, 6, 16-20].
Рассмотрим, в каком порядке рассматривались первые пять единичных показателей. В работе [16]:
Технический облик авиационного зенитного ракетного комплекса на базе БпЛА вертолетного типа для войск ПВО ВКС ВС РФ

Рубрика: Технические науки
Дата публикации: 02.08.2020 2020-08-02
Статья просмотрена: 204 раза
Библиографическое описание:
Мосиенко, С. А. Технический облик авиационного зенитного ракетного комплекса на базе БпЛА вертолетного типа для войск ПВО ВКС ВС РФ / С. А. Мосиенко. — Текст : непосредственный // Молодой ученый. — 2020. — № 31 (321). — С. 26-32. — URL: https://moluch.ru/archive/321/73003/ (дата обращения: 08.12.2021).
В статье приведен технический облик авиационного зенитного ракетного комплекса на базе беспилотного летательного аппарата вертолетного типа для войск противовоздушной обороны Воздушно-космических сил Вооруженных сил Российской Федерации.
Ключевые слова: обнаружение, радиолокационная станция, средства ПРО-ПВО.
Введение. Сегодня возможности противоракетной и противовоздушной обороны (ПРО-ПВО) Воздушно-космических сил (ВКС) Вооруженных сил (ВС) Российской Федерации (РФ) по отражению массированных ударов маловысотных средств воздушного нападения (СВН) на пункты управления высших звеньев государственного и военного управления оказываются явно недостаточными.
Проблема обнаружения малоразмерных и маловысотных СВН средствами ПВО на расстояниях, достаточных для приведения средств ПВО в состояние готовности к их поражению, обусловлена, прежде всего, кривизной поверхности Земли и наличием углов закрытия, создаваемых рельефом местности. Использование вышек 40В6М/40В6МД для размещения многофункциональных радиолокационных станций (РЛС) зенитных ракетных систем/комплексов (ЗРС) С-300/C-400 не решет кардинально проблему обнаружения малоразмерных и маловысотных СВН [5].
Для решения проблемы обнаружения маловысотных СВН ВКС ВС РФ используют авиационные (А-50, модернизируемый А-50У и вертолётный (Ка-31)) комплексы ДРЛО. В [5] показано, что затраты на создание маловысотного радиолокационного поля (РЛП), реализуемого путем использования авиационных комплексов ДРЛО, функционирующих продолжительное время, оказываются неприемлемо высокими. В [5–7] обсуждалась альтернатива применения комплексов ДРЛО для решения этой задачи — использование беспилотного летательного аппарата вертолетного типа (БпЛА-ВТ) с установленным целевым радиотехническим оборудованием, оптико-электронной аппаратурой и, что крайне важно — средствами поражения СВН. Такая мобильная система представляет собой авиационный зенитный ракетный комплекс (АЗРК)

Рис. 1. Предлагаемый принцип обоснования облика АЗРК
Общие требования, предъявляемые к АЗРК для совместного применения с ЗРК С-300/C-400 или зенитного ракетно-пушечного комплекса (ЗРПК) “Панцирь-С1” ВКС ВС РФ сформулированы в [2]. Остановимся на них подробнее.
Вместе с тем, оснащение современных и перспективных БпЛА самолетного типа (особенно оперативно-тактического и тактического назначения) сталкивается с необходимостью удовлетворения требований по массогабаритным параметрам и параметрам энергопотребления современных бортовых РЛС. Так, масса бортовой вертолетной РЛС «Арбалет», предназначенной для перспективных вертолетов типа Ка-52, составляет 140 кг, масса радиолокационной системы управления вооружением РЛСУ «Барс-29» самолета МиГ-29 составляет 250 кг, самолетные РЛС типа «Жук» (самолеты МиГ-23, Су-27, МиГ-29) имеют в зависимости от модификации массу от 220 до 300 кг, масса бортовых РЛС поколения «4++» «Ирбис-Э» превышает 480 кг. Наименьшими массогабаритными показателями из отечественных обладают РЛС семейства «Копье», предназначенные для установки на легкие истребители типа МиГ-21–100 кг. Однако, максимальные взлетные массы тактических и оперативно-тактических БпЛА серьезно ограничены: например, максимальная взлетная масса БпЛА «Дозор-85» составляет 85 кг, БпЛА «Иркут» — 200 кг, БпЛА «Форпост» — 430 кг, БпЛА «Пчела» — 138 кг. При этом массы их целевых нагрузок не должны превышать значений от 50 до 100 кг. Этим условиям не удовлетворяет ни одна из отечественных малогабаритных бортовых РЛС [3]. В настоящее время в России разрабатываются и испытываются несколько комплексов тяжелых БпЛА — БпЛА типа “Орион” (АО «Компания «Кронштад», “Альтаир”, ОКБ им. Симонова) и БпЛА “Охотник” (ПАО «Комания «Сухой») [8].
Задача создания маловысотного РЛП для средств ПВО ВКС на различных ТВД может быть решена при помощи БпЛА-ВТ [7]. Несмотря на актуальность решения этой задачи, опытно-конструкторские работы (ОКР) по разработке АЗРК на базе БпЛА-ВТ до сих пор не проводились [5]. Необходимо отметить, что все многолетние попытки предприятий ОПК России, направленные на разработку БпЛА-ВТ с полезной нагрузкой более 500 кг для Вооруженных сил России, не увенчались успехом. Результаты зарубежных работ, по разработке БпЛА-ВТ на базе типовых пилотируемых вертолетов показал нецелесообразность использования этих аппаратов в таком качестве в виду высокой стоимости летного часа. Необходимо заметить, что стоимость летного часа является интегральной характеристикой, которая демонстрирует экономическую эффективность авиатехники. Сравнительная стоимость летного часа пилотируемых вертолетов и БпЛА-ВТ показана на рисунке 2.
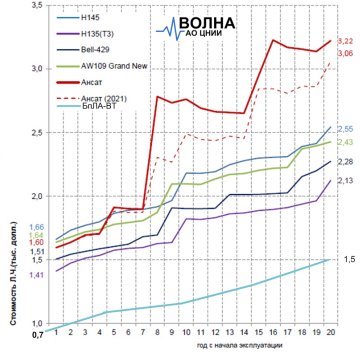
Рис. 2. Сравнительная стоимость летного часа пилотируемых вертолетов и БпЛА-ВТ
Калькуляции летных часов пилотируемых вертолетов и БпЛА-ВТ были выполнены на основании методик расчета летного часа АО “Вертолеты России”. Видно, что стоимость летного часа БпЛА-ВТ, предлагаемого к созданию АО “ЦНИИ “ВОЛНА”, вдвое меньше, чем аналогичная величина пилотируемого вертолета “Ансат”. Известно, что на этапе проектирования вертолета главный конструктор рассчитывает стоимость топлива в составе лётного часа (через целевой расход топлива). Однако, расход топлива, в основном, зависит от примененного двигателя. Поэтому главный конструктор «интегрирует” двигатель как силовую установку в конструкцию вертолета. Например, в российском вертолете “Ансат” используются два зарубежных двигателя Pratt & Whitney PW-207K (Канада) мощностью 630 л.с. каждый, что обеспечивает с максимальную полезную нагрузку на внешней подвеске 1272 кг. Зачастую расходом (его стоимостью в лётном часе) топлива даже «жертвуют” в пользу простоты (стоимости) обслуживания воздушного судна. Для сравнения: на вертолетах Bell 429 (США) и “Ансат” (Россия) используются одинаковые двигатели Pratt & Whitney, однако стоимость обслуживания “Ансат” оказывается большей. Это объясняется тем, что для выполнения регламентных работ на Bell 429 не требуется демонтаж двигателя, в то время как “Ансат” он необходим. Использование типовых пилотируемых вертолетов, выпускаемых АО “Вертолеты России”, для разработки БпЛА-ВТ заведомо приведет к высокой стоимости летного часа, что негативно скажется на эффективности создания РЛП.
Эти обстоятельства еще раз подтверждают, что пришла пора “…настойчиво искать прорывные разработки, выявлять научные коллективы, способные реализовать собственный задел по требуемому профилю, стимулировать здоровую конкуренцию на этапе научно-исследовательских и опытно-конструкторских разработок” [1].
Технический облик АЗРК. АЗРК предназначен для несения боевого дежурства в составе сил ПВО, ведения воздушной разведки, оповещения прикрываемых войск и уничтожения СВН противника, атакующих пункты управления ВС РФ, в том числе — места постоянного и временного пребывания главы государства, объекты высших звеньев государственного и военного управления Российской Федерации.
Предлагаемый АО “ЦНИИ “ВОЛНА” АЗРК содержит БпЛА-ВТ, мобильный пункт управления (МПУ) и мобильную платформу (МП) для перевозки и хранения БпЛА-ВТ. БпЛА-ВТ с соосной схемой винтов обеспечивает дальность полета до 330 км с полезной нагрузкой до 550 кг. АЗРК оснащен бортовой РЛС кругового обзора Н-025, не имеющей мировых аналогов аппаратурой управления на основе искусственного интеллекта, ЗУР “Сосна-Р” 9М340, оптико-электронной системой с подсистемами технического зрения и распознавания образов, мобильным пунктом управления и транспортной платформой для перевозки БпЛА-ВТ.
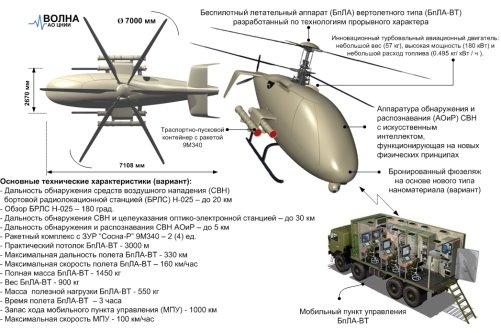
Рис. 3. Технический облик АЗРК
Организационно-техническую основу управления БпЛА-ВТ составляет система управления, представляющая собой совокупность функционально связанных между собой органов управления, мобильный пункт управления (МПУ) и средств управления. МПУ, предназначенный для управления и приема данных от БпЛА-ВТ, содержит автомобильное шасси, предназначенное для оперативного перемещения МПУ, кузов-контейнер, предназначенный для размещения комплекса системы автоматизированного управления и связи (КСАУС), установленная на кузове-контейнере система автоматического сопровождения и управления полетом (САСУП), предназначенная для автоматического оптико-электронного сопровождения и управления БпЛА-ВТ.
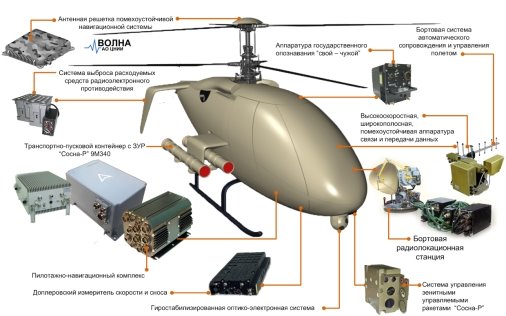
Рис. 4. Технический облик БпЛА-ВТ
В качестве мобильной платформы используется прицеп автомобильный многоцелевого назначения, предназначенный для перевозки и хранения БпЛА-ВТ, причем прицеп оснащен дышлом, тентом и грузоподъемным поворотным консольным краном, предназначенным для подъема погрузки-выгрузки БпЛА-ВТ на прицеп. Кузов-контейнер, содержит систему автоматического сопровождения и управления полетом, предназначенную для автоматического сопровождения и управления полетом БпЛА-ВТ, систему электроснабжения, предназначенную для электропитания всех элементов комплекса, систему жизнеобеспечения, предназначенную для обогрева и кондиционирования обитаемого отделения, очистки атмосферного воздуха от отравляющих веществ, радиоактивной пыли, бактериологических аэрозолей и аварийно опасных веществ, бортовую информационно-управляющую систему, предназначенную для сбора, хранения, обработки и отражения информации о местности, управления средствами и системами комплекса, приема и передачи радиолокационно-оптических, навигационных и диагностических данных, комплекс радиационной разведки, предназначенный для ведения радиационной разведки местности, блокиратор радиоуправляемых взрывных устройств, предназначенный для блокирования радиочастот взрывных устройств при движении МПУ, телевизионное смотровое устройство, предназначенное для обеспечения управления МПУ при повреждениях стекол, систему прожекторного освещения, предназначенную для проведения работ экипажем комплекса в темное время суток.
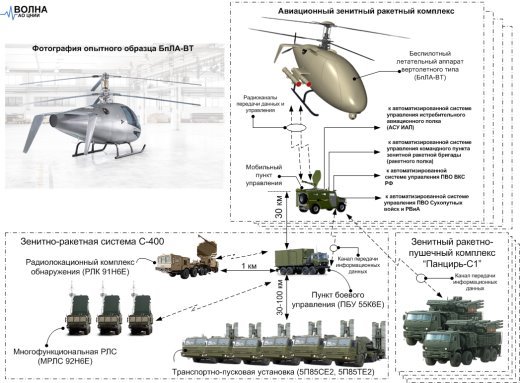
Рис. 5. Взаимодействия АЗРК с средствами ПВО ВКС ВС РФ
Заключение. Средства бесплотной авиации неоднократно показывали свою высокую эффективность при ведении боевых операций на различных ТВД. Создание БпЛА-ВТ — прорывная технология, которая может способствовать решению большого числа проблем не только войск ПРО-ПВО ВКС, но и других родов войск Вооруженных сил РФ. ВМС США уже имеют более 30 принятых на вооружение БпЛА-ВТ типа MQ-8B “Fire Scout” и MQ-8C “Fire-X”, построенных на базе вертолета Bell 407. Аргентинская компания AeroDreams ежегодно производит более 400 штук БпЛА-ВТ “AeroDreams Chi-7”, который разработан на базе пилотируемого вертолета Heli-Sport CH-7, и экспортирует их. Аэрокосмические компании Boeing и Airbus начали проведение летных испытания опытных образцов тяжелых БпЛА-ВТ. В этих условиях необходимо интенсифицировать процесс создания такой техники в России — автор неоднократно подчеркивал ([5,6,7]), что времени на проведение научно-исследовательской работы (НИР) по обоснованию технического облика, оценки технологических и финансовых рисков создания БпЛА-ВТ в интересах ПРО-ПВО ВКС уже не осталось. Но у российских производителей, исследователей, конструкторов есть заделы как по техническим решениям, так и по прорывным технологиям. Осталось только поддержать смелость разработчиков, готовых взяться за столь сложное и неизведанное дело, волевыми решениями органов военного и государственного управления России.
2. Рудианов Н. А., Хрущев В. С. Обоснование облика боевых и обеспечивающих робототехнических комплексов Сухопутных войск // Инженерный журнал: наука и инновации. 2013, вып.8. C. 1–8
3. Брайткрайц С. Г., Ильин Е. М., Полубехин А. И., Прищеп Д. В., Юрин А. Д., Хомяков К. А. Проблемы и пути создания радиолокационных систем для беспилотных летательных аппаратов тактического и оперативно-тактического назначения // Известия ТулГУ. Технические науки. 2018. Вып.11. C. 303–313.
4. Макаренко С. И., Тимошенко А. В. Анализ средств и способов противодействия беспилотным летательным аппаратам. Часть 2. Огневое поражение и физический перехват // Системы управления связи и безопасности. 2020. № 1. C. 147–197.
5. Мосиенко С. А. Беспилотный авиационный комплекс дальнего радиолокационно-оптического обнаружения.- М., 2017. — 238 с.
6. Мосиенко С. А. Актуальные проблемы войсковой ПВО Сухопутных войск и пути ее решения // Молодой ученый. 2020. № 29 (319). С.46–48.
7. Мосиенко С. А. Войсковая ПВО: увеличение дальности обнаружения воздушных целей // Молодой ученый. 2020. № 30 (320). С.70–73.
8. Турик А. А., Мирошников В. И., Гончаров С. А. Применение БПЛА сторонами при ведении боевых действий в САР //Вестник научных конференции. 2018. № 5–1 (33). С.112–115.