Частотно-регулируемый электропривод
Частотно-регулируемый, или частотно-управляемый привод (ЧРП, ЧУП) — система управления частотой вращения ротора асинхронного двигателя, которая включает в себя электродвигатель и преобразователь частоты.
Так как асинхронные двигатели могут вращаться на одной частоте, задаваемой им питающей сетью переменного тока, для управления ими используют преобразователи частоты.
Схема 1. Частотно-регулируемый привод.
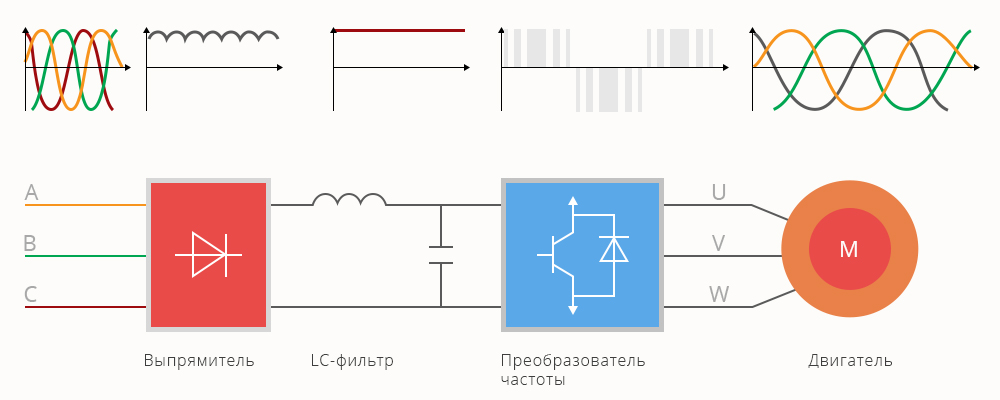
Частотный преобразователь (ЧП) — это устройство, объединяющее в себе выпрямитель и инвертор. Выпрямитель преобразует переменный ток промышленной частоты в постоянный, а инвертор наоборот. Выходные тиристоры (GTO) или транзисторы (IGBT), открываясь и закрываясь при помощи электронного управления, формируют необходимое напряжение, аналогичное трехфазному. Возможность менять частоту напряжения позволяет изменять отдаваемую в нагрузку мощность не дискретно (как при механической регулировке), а непрерывно. За счет такого принципа действия частотно регулируемый привод может плавно регулировать параметры вращения двигателя.
Преимущества применения частотно регулируемых приводов для управления АД
Недостатки систем частотного регулируемого привода
Отрасли применения ЧРП
Список отраслей получается обширным, сложнее найти отрасль, где бы не применялись ЧП:
Нефтедобыча и переработка: насосное оборудование, привод аппаратов воздушного охлаждения (АВО) и градирен, комплексная автоматизация различных технологических линий.
Металлургия: приводы рольгангов, конвейеров, прокатных станов, наматывающих устройств волочильных станов, насосов, вентиляторов.
Машиностроение: привод обрабатывающих станков, насосы, конвейерные линии, полиграфические машины.
Горнодобывающее и обогатительное производство: дробилки, мешалки, конвейеры, песковые и пульповые насосы.
Химическая промышленность: насосы, мешалки, грануляторы, экструдеры, центрифуги, приводы дымососов и вентиляторов, АСУ.
Пищевая промышленность: грануляторы, экструдеры, мельницы, дробилки, куттеры, жом-прессы, этикетировочные аппараты, конвейеры, технологические линии, насосы, вентиляторы.
ЖКХ: различное насосное оборудование, АСУ.
Стройкомплекс: краны, подъемные механизмы.
Транспорт: судовой привод, электротранспорт.
Как выбрать частотный преобразователь
СОВЕТ: если какой-то из параметров должен отвечать особым требованиям, то лучше предпочесть не потенциально подходящий частотно регулируемый электропривод, а тот, который будет классом выше.
Выполненные проекты
НПО «Винт», г. Москва. Подруливающие устройства для судового привода. Суда, оборудованные ими, получают большую маневренность при швартовке, проходе узкостей, тралении. Значительно снижается риск столкновения судов. Сокращается время разгрузки и погрузки, что дает экономию времени и денег.
ООО «Стройбезопасность», г. Тихорецк. Оснащение приводов башенных кранов. Это решение упрощает управление, дает возможность тонко регулировать скорость в большом диапазоне, приводит к отсутствию пусковых бросков тока.
ОАО «Тагмет», г. Таганрог. Рольганги щелевой закалочной печи. Обеспечивают точный догон трубы в зоне загрузки и отрыв на выходе и безаварийную работу оборудования. Главный экономический эффект применения частотных преобразователей — это повышение качества продукции.
ОАО «Ульяновский сахарный завод», р.п. Цильна, Ульяновская обл. Привод жом-пресса 500 кВт. Регулирует обороты по нагрузке: в результате стружка подается неравномерно и не происходит перебросов при этом поддерживается нужный уровень давления в шахте. Увеличивается срок службы оборудования, снижается количество аварийных остановок, упрощается обслуживание процесса.
МУП «Водоканал», г. Новочебоксарск. Автоматизированная система оперативного диспетчерского управления (АСОДУ) водоснабжением г. Новочебоксарска. Кроме снижения прямых затрат на энергоресурсы, снизилась аварийность и улучшилось качество обслуживания.
Преобразователи частоты
В данной статье мы рассмотрим что такое частотный преобразователь, сферы применения преобразователей частоты, их плюсы и минусы, а также схемы частотников.
Преобразователи частоты (или частотники) – электротехническое оборудование для регулирования частоты переменного напряжения. Основная сфера применения этих устройств – изменение частоты вращения и крутящего момента электрических машин асинхронного типа. Принцип действия управления и регулирования основан на зависимости скорости вращения магнитного поля от частоты питающего напряжения.
Асинхронные электродвигатели широко используются в качестве приводов промышленного оборудования, насосных агрегатов, регулирующей арматуры и других устройств. Основным недостатком этих электрических машин являются постоянная скорость вращения, большие пусковые токи. При помощи частотных преобразователей возможно устранить эти недостатки и существенно расширить сферу применения электродвигателей переменного тока.
Виды преобразователей частоты
Частотные преобразователи различаются по конструкции, принципу действия, способу управления. По конструктивному исполнению преобразователи частоты разделяют на две большие группы:
Электромашинные частотники.
Электромашинные или индукционные преобразователи частоты представляют собой двигатели переменного тока, включенные в режим генератора. Применяются такие электротехнические устройства относительного редко, в условиях, где затруднено или невозможно применение электронных частотных преобразователей.

Электронные преобразователи.
Полупроводниковые ЧП состоят из силовой части, выполненной на транзисторах или тиристорах, и схемы управления на базе микроконтроллеров. Это электротехническое оборудование пригодно для трехфазных и однофазных приводов любого назначения. Различают ЧП с непосредственной связью с питающей сетью и устройства с промежуточным звеном постоянного тока.

Непосредственные преобразователи частоты
Такие частотники построены на базе быстродействующих тиристорных преобразователей, включенных по мостовым, перекрестным, нулевым и встречно-параллельным схемам.
Устройства такого типа включаются непосредственно в питающую сеть.
Плюсы непосредственных преобразователей частоты:
Минусы непосредственных преобразователей частоты:
Преобразователи частоты с промежуточным звеном постоянного тока.
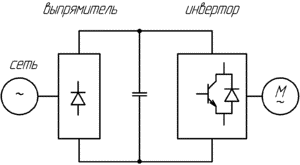
Частотные преобразователи этого типа выполнены на базе схемы двойного преобразования. Питающее сетевое напряжение преобразуется в постоянное, затем сглаживается и инвертируется в переменное выходное напряжение заданной частоты.
Плюсы преобразователей с промежуточным звеном постоянного тока:
Минусы преобразователей с промежуточным звеном постоянного тока:
Устройство преобразователей с промежуточным звеном постоянного тока
Состоят такие преобразователи из нескольких основных блоков:
Способы управления преобразователем
По принципу управления различают 2 основных вида частотных преобразователей:
ЧП со скалярным управлением
Частотники этого типа выдают на выходе напряжение определенной частоты и амплитуды для поддержания определенного магнитного потока в обмотках статора. Частотники с таким принципом регулирования отличаются относительно низкой стоимостью, простотой конструкции. Нижний предел регулировки скорости составляет около 10 % от номинальной частоты вращения. Их можно использовать для управления сразу несколькими двигателями. Скалярные ЧП используют для приводов насосных агрегатов, вентиляторов и других устройств и оборудования, где не требуется поддерживать скорость вращения ротора вне зависимости от нагрузки.
ЧП с векторным управлением
Микропроцессорные устройства преобразователей с векторным управлением автоматически вычисляют взаимодействие магнитных полей статора и ротора. ЧП такого типа обеспечивают постоянную частоту вращения ротора вне зависимости от нагрузки. Они используются для оборудования, где необходимо поддерживать необходимый момент силы при низких скоростях, высокое быстродействие и точность регулирования. Применение векторных ЧП позволяет регулировать частоту вращения, задавать требуемый момент на валу.
ЧП с векторным управлением делятся на преобразователи бездатчикового типа и устройства с обратной связью по скорости. Последние используются для приводов с широким диапазоном регулирования скорости до 1:1000, необходимости позиционирования точного положения вала, регулирования момента при низких скоростях, точного поддержания частоты вращения, пуска двигателя с номинальным моментом. Преобразователи без датчика скорости применяют для приводов с более низкими требованиями.
Режимы управления частотными преобразователями
В большинстве моделей современных частотных преобразователей реализована возможность управления в нескольких режимах:
1) Ручное управление.
2) Внешнее управление.
3) Управление по дискретным входам или “сухим контактам”.
4) Управление по событиям.

Преимущества частотных преобразователей.
1) Экономия электроэнергии.
2) Увеличение срока службы промышленного оборудования.
3) Отсутствие необходимости проводить техническое обслуживание.
4) Возможность удаленного управления и контроля параметров оборудования с электроприводом.
5) Широкий диапазон мощности двигателей.
6) Защита электродвигателя от аварий и аномальных режимов работы.
7) Снижение уровня шума работающего двигателя.

Сферы применения
Частотно-регулируемые приводы применяют:
Внедрение частотно-регулируемых приводов дает значительный экономический эффект. Снижение затрат достигается за счет сокращения потребления электроэнергии, расходов на ремонт и ТО двигателей и оборудования, возможности использования более дешевых асинхронных электродвигателей с короткозамкнутым ротором, а также сокращения других производственных издержек. Средний срок окупаемости частотных преобразователей составляет от 3-х месяцев до трех лет.
Частотно-регулируемые приводы как основа эффективного управления электродвигателями
В постиндустриальную эпоху, начиная с 80-х годов ХХ века, асинхронный электропривод стал основным потребителем электрической энергии (свыше 60% электроэнергии в промышленности потребляется данными электродвигателями), как наиболее простой, за счет этого и дешевый, и надежный тип двигателя. Большинство секторов экономики стали использовать (или еще более нарастили) двигательную нагрузку в виде: насосных, компрессорных, вентиляционных и т.п. установок. Технологический процесс различных производств зачастую стал требовать изменения частоты вращения каких-либо исполнительных механизмов, например, когда расход водопотребления мал в магистральной сети, достаточно снизить частоту вращения ротора электродвигателя, который приводит в действие магистральный насос, тем самым снизив потребление воды.
В тоже время возникла тенденция к использованию энергосберегающих технологий, снижению потерь электроэнергии, в том числе и в силовых машинах. Ощутимый рост стоимости энергоресурсов, одержимость рационального их использования, а также бурное развитие электронной и вычислительной технике способствовали появлению устройств, предназначенных для экономного управления электродвигателями различного типа.
О том, как обеспечить максимально эффективное управление электроприводом, говорим сегодня.
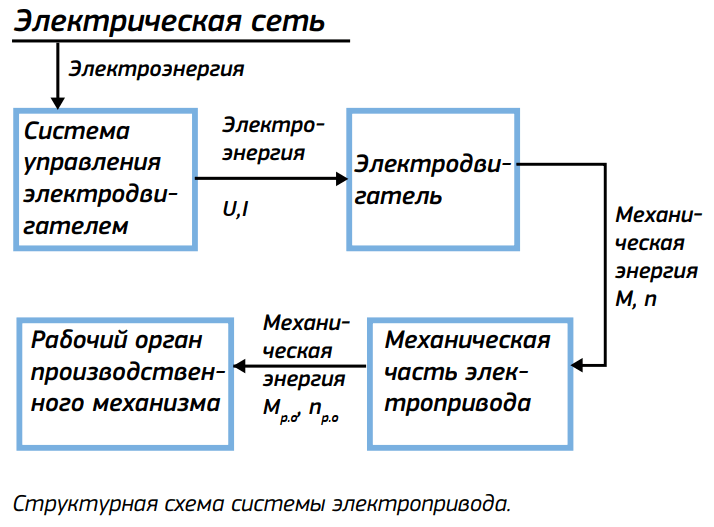
Большая часть электрической энергии, потребляемой производственными и технологическими установками, используется для выполнения какой-либо механической работы. Для приведения в движение рабочих органов различных производственных и технологических механизмов преимущественно используются асинхронные электрические двигатели с короткозамкнутым ротором (в дальнейшем именно о данном типе электродвигателя и будем вести повествование). Сам электродвигатель, его система управления и механическое устройство, передающее движение от вала двигателя к производственному механизму, образуют систему электрического привода.
Наличие минимальных потерь электроэнергии в обмотках за счет регулирования частоты вращения двигателя, возможность плавного пуска за счет равномерного увеличения частоты и напряжения — это основные постулаты эффективного управления электродвигателями.
Ведь раньше и до сих пор существуют такие способы управления двигателем, как:
Но эти и другие способы регулирования частоты несут с собой главный недостаток — значительные потери электрической энергии, а ступенчатое регулирование по определению является недостаточно гибким способом.
Потери неизбежны?
Остановимся более подробно на электрических потерях, возникающих в асинхронном электродвигателе.
Работа электрического привода характеризуется целым рядом электрических и механических величин.
К электрическим величинам относятся:
Основными механическими величинами являются
P=(M • n)/(9,55) (1)
при учете которой формула приобретает вид:
P=M•ω (2)
Зависимость вращающего момента двигателя M от частоты вращения его ротора n называется механической характеристикой электродвигателя. Отметим, что при работе асинхронной машины со статора на ротор передается через воздушный зазор с помощью электромагнитного поля так называемая электромагнитная мощность:

Часть этой мощности передается на вал ротора в виде механической мощности согласно выражению (2), а остальная часть выделяется в виде потерь в активных сопротивлениях всех трех фаз роторной цепи.
Эти потери, называемые электрическими, равны:

Таким образом, электрические потери определяются квадратом тока, проходящего по обмоткам.
Они в сильной степени определяются нагрузкой асинхронного двигателя. Все другие виды потерь, кроме электрических, изменяются с нагрузкой менее существенно.
Поэтому рассмотрим, как изменяются электрические потери асинхронного двигателя при регулировании частоты вращения.
Электрические потери непосредственно в обмотке ротора электродвигателя выделяются в виде тепла внутри машины и потому определяют ее нагрев. Очевидно, чем больше электрические потери в цепи ротора, тем меньше КПД двигателя, тем менее экономична его работа.
Учитывая, что потери в статоре примерно пропорциональны потерям в роторе, еще более понятно стремление уменьшить электрические потери в роторе. Тот способ регулирования частоты вращения двигателя является экономичным, при котором электрические потери в роторе относительно невелики.
Из анализа выражений следует, что самый экономичный способ управления двигателями заключается в частоте вращения ротора близкой к синхронной.
Частотно-регулируемые приводы
В обиход различных сфер промышленности, которые используют насосное, вентиляционной оборудование, производства, использующие конвейерные установки, объекты генерации (ТЭЦ, ГРЭС и т.п.) и многих других, вошли такие установки как частотно-регулируемые привода (ЧРП), также называемые — преобразователями частоты (ПЧ). Данные установки и позволяют изменять частоту и амплитуду трехфазного напряжения, поступающего на электродвигатель, за счет чего и достигается гибкое изменение режимов работы управляющих механизмов.

Высоковольтный частотно-регулируемый привод
Приведем краткое описание существующих преобразователей частоты.
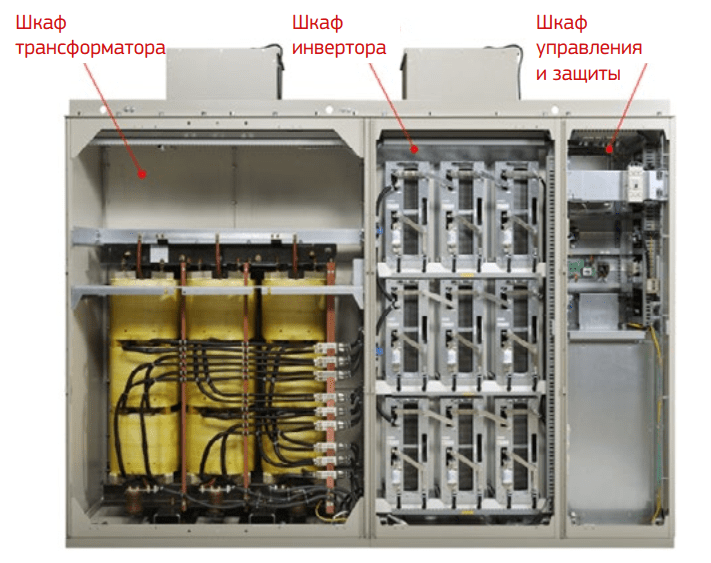
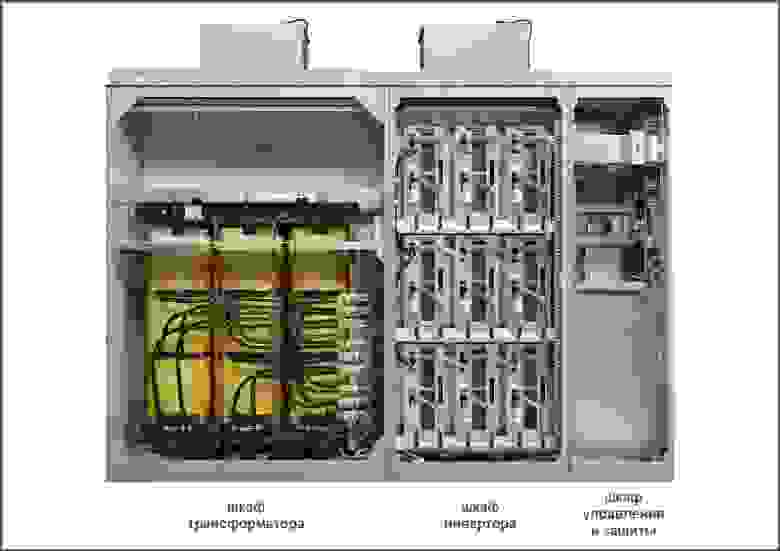
Конструктивно преобразователь состоит из функционально связанных блоков: блока входного трансформатора (шкаф трансформатора); многоуровневого инвертора (шкаф инвертора) и системы управления и защит с блоком ввода и отображения информации (шкаф управления и защит).
В шкафу входного трансформатора производится передача энергии от трехфазного источника питания входным многообмоточным трансформатором, который распределяет пониженное напряжение на многоуровневый инвертор.
Многоуровневый инвертор состоит из унифицированных ячеек – преобразователей. Количество ячеек определяется конкретным конструктивом и заводом-изготовителем. Каждая ячейка, оснащена выпрямителем и фильтром звена постоянного тока с мостовым инвертором напряжения на современных IGBT транзисторах (биполярный транзистор с изолированным затвором). Первоначально выпрямляется входной переменный ток, а затем с помощью полупроводникового инвертора преобразуется в переменный ток с регулируемой частотой и напряжением.
Полученные источники управляемого переменного напряжения соединяются последовательно в звенья, формируя фазу напряжения. Построение выходной трехфазной системы питания асинхронного двигателя производится включением звеньев по схеме «ЗВЕЗДА».
Система управления защиты располагается в шкафу управления и защиты и представлена многофункциональным микропроцессорным блоком с системой питания от источника собственных нужд преобразователя, устройством ввода-вывода информации и первичными сенсорами электрических режимов работы преобразователя.
Потенциал экономии: считаем вместе
На основании данных, предоставленных компанией Mitsubishi Electric, оценим потенциал энергосбережения при внедрении преобразователей частоты.
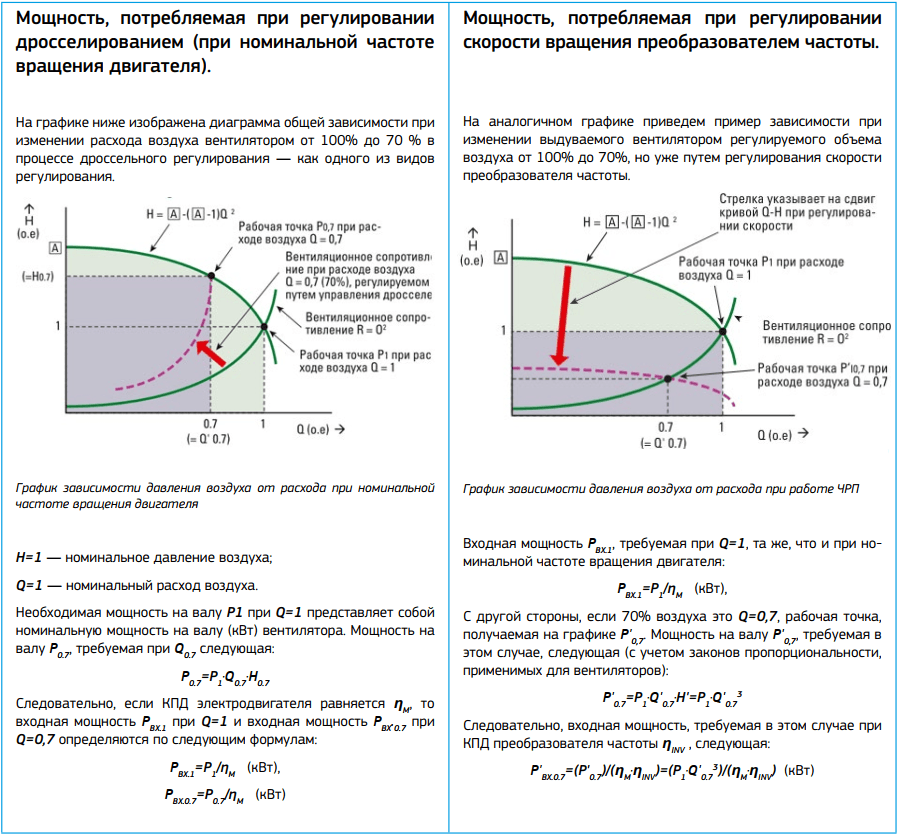
Вначале посмотрим, как меняется мощность при различных режимах регулирования двигателя:
А теперь приведем пример расчета:
Экономия между работой под номинальной нагрузкой и работой с возможностью регулирования скорости вращения двигателя (работа совместно с ЧРП) равна:
7 446 400 кВт • ч/год — 3 846 400 кВт • ч/год= 3 600 000 кВт • ч/год
Учтем тариф на электроэнергию равным — 1 кВт•ч / 5,5 руб. Стоит отметить, что стоимость взята по первой ценовой категории и усредненному значению для одного из промышленных предприятий Приморского края за 2019г.
Получим экономию в деньгах:
3 600 000 кВт • ч/год • 5,5 руб/кВт • ч= 19 800 000 руб/год
Практика реализации подобных проектов позволяет с учетом затрат на эксплуатацию и ремонты, а также стоимости самих преобразователей частоты, добиться срока окупаемости в 3 года.
Как показывают цифры, в экономической целесообразности внедрения ЧРП сомневаться не приходится. Однако одной экономикой эффект от их внедрения не ограничивается. О том, как ЧРП осуществляют плавный пуск двигателя, значительно уменьшая его износ, читайте в следующих выпусках журнала.
Самый экономичный способ управления двигателями – преобразователь частоты

В промышленности свыше 60% электроэнергии потребляется асинхронными электроприводами – в насосных, компрессорных, вентиляционных и других установках. Это наиболее простой, а потому дешевый и надежный тип двигателя.
Технологический процесс различных производств в промышленности требует гибкого изменения частоты вращения каких-либо исполнительных механизмов. Благодаря бурному развитию электронной и вычислительной техники, а также стремлению снизить потери электроэнергии появились устройства для экономного управления электродвигателями различного типа. В этой статье как раз и поговорим о том, как обеспечить максимально эффективное управление электроприводом. Работая в компании «Первый инженер» (группа компаний ЛАНИТ), я вижу, что наши заказчики всё больше внимания уделяют энергоэффективности
Большая часть электрической энергии, потребляемой производственными и технологическими установками, используется для выполнения какой-либо механической работы. Для приведения в движение рабочих органов различных производственных и технологических механизмов преимущественно используются асинхронные электрические двигатели с короткозамкнутым ротором (в дальнейшем именно о данном типе электродвигателя и будем вести повествование). Сам электродвигатель, его система управления и механическое устройство, передающее движение от вала двигателя к производственному механизму, образуют систему электрического привода.

Наличие минимальных потерь электроэнергии в обмотках за счет регулирования частоты вращения двигателя, возможность плавного пуска за счет равномерного увеличения частоты и напряжения — это основные постулаты эффективного управления электродвигателями.
Ведь ранее существовали и до сих пор существуют такие способы управления двигателем, как:
Потери неизбежны?
Остановимся более подробно на электрических потерях, возникающих в асинхронном электродвигателе.
Работа электрического привода характеризуется целым рядом электрических и механических величин.
К электрическим величинам относятся:

при учете которой формула приобретает вид:

Зависимость вращающего момента двигателя M от частоты вращения его ротора n называется механической характеристикой электродвигателя. Отметим, что при работе асинхронной машины со статора на ротор передается через воздушный зазор с помощью электромагнитного поля так называемая электромагнитная мощность:

Часть этой мощности передается на вал ротора в виде механической мощности согласно выражению (2), а остальная часть выделяется в виде потерь в активных сопротивлениях всех трех фаз роторной цепи.
Эти потери, называемые электрическими, равны:

Таким образом, электрические потери определяются квадратом тока, проходящего по обмоткам.
Они в сильной степени определяются нагрузкой асинхронного двигателя. Все другие виды потерь, кроме электрических, изменяются с нагрузкой менее существенно.
Поэтому рассмотрим, как изменяются электрические потери асинхронного двигателя при регулировании частоты вращения.
Электрические потери непосредственно в обмотке ротора электродвигателя выделяются в виде тепла внутри машины и потому определяют ее нагрев. Очевидно, чем больше электрические потери в цепи ротора, тем меньше КПД двигателя, тем менее экономична его работа.
Учитывая, что потери в статоре примерно пропорциональны потерям в роторе, еще более понятно стремление уменьшить электрические потери в роторе. Тот способ регулирования частоты вращения двигателя является экономичным, при котором электрические потери в роторе относительно невелики.
Из анализа выражений следует, что самый экономичный способ управления двигателями заключается в частоте вращения ротора, близкой к синхронной.
Частотно-регулируемые приводы
В обиход различных сфер промышленности, которые используют насосное, вентиляционное оборудование, конвейерные установки, объекты генерации (ТЭЦ, ГРЭС и т.п.) и др. вошли такие установки, как частотно-регулируемые приводы (ЧРП), также называемые преобразователями частоты (ПЧ). Данные установки и позволяют изменять частоту и амплитуду трехфазного напряжения, поступающего на электродвигатель, за счет чего и достигается гибкое изменение режимов работы управляющих механизмов.

Высоковольтный частотно-регулируемый привод
Приведем краткое описание существующих преобразователей частоты.
Конструктивно преобразователь состоит из функционально связанных блоков: блока входного трансформатора (шкаф трансформатора); многоуровневого инвертора (шкаф инвертора) и системы управления и защит с блоком ввода и отображения информации (шкаф управления и защит).
В шкафу входного трансформатора производится передача энергии от трехфазного источника питания входным многообмоточным трансформатором, который распределяет пониженное напряжение на многоуровневый инвертор.
Многоуровневый инвертор состоит из унифицированных ячеек – преобразователей. Количество ячеек определяется конкретным конструктивом и заводом-изготовителем. Каждая ячейка оснащена выпрямителем и фильтром звена постоянного тока с мостовым инвертором напряжения на современных IGBT транзисторах (биполярный транзистор с изолированным затвором). Первоначально выпрямляется входной переменный ток, а затем с помощью полупроводникового инвертора преобразуется в переменный ток с регулируемой частотой и напряжением.
Полученные источники управляемого переменного напряжения соединяются последовательно в звенья, формируя фазу напряжения. Построение выходной трехфазной системы питания асинхронного двигателя производится включением звеньев по схеме «ЗВЕЗДА».
Система управления защиты располагается в шкафу управления и защиты и представлена многофункциональным микропроцессорным блоком с системой питания от источника собственных нужд преобразователя, устройством ввода-вывода информации и первичными сенсорами электрических режимов работы преобразователя.
Потенциал экономии: считаем вместе
На основании данных, предоставленных компанией Mitsubishi Electric, оценим потенциал энергосбережения при внедрении преобразователей частоты.
Вначале посмотрим, как меняется мощность при различных режимах регулирования двигателя:
А теперь приведем пример расчета.
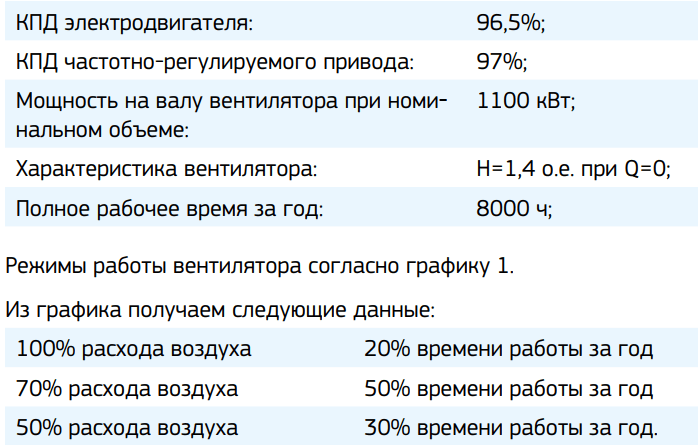
КПД электродвигателя: 96,5%;
КПД частотно-регулируемого привода: 97%;
Мощность на валу вентилятора при номинальном объеме: 1100 кВт;
Характеристика вентилятора: H=1,4 о.е. при Q=0;
Полное рабочее время за год: 8000 ч.
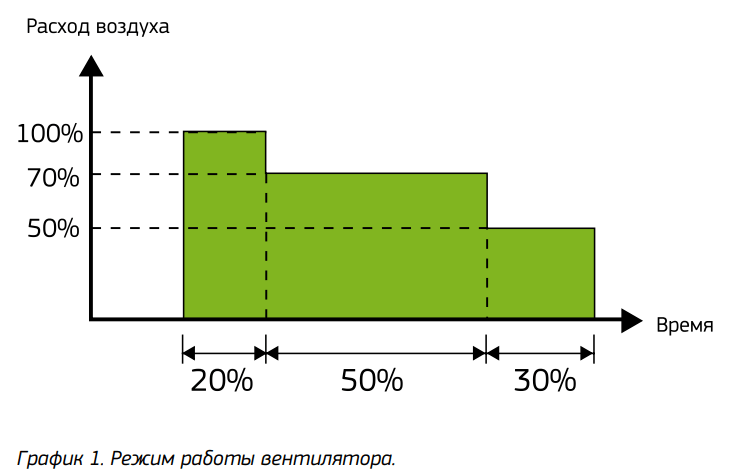
Режимы работы вентилятора согласно графику:

Из графика получаем следующие данные:
100% расхода воздуха – 20% времени работы за год;
70% расхода воздуха – 50% времени работы за год;
50% расхода воздуха – 30% времени работы за год.
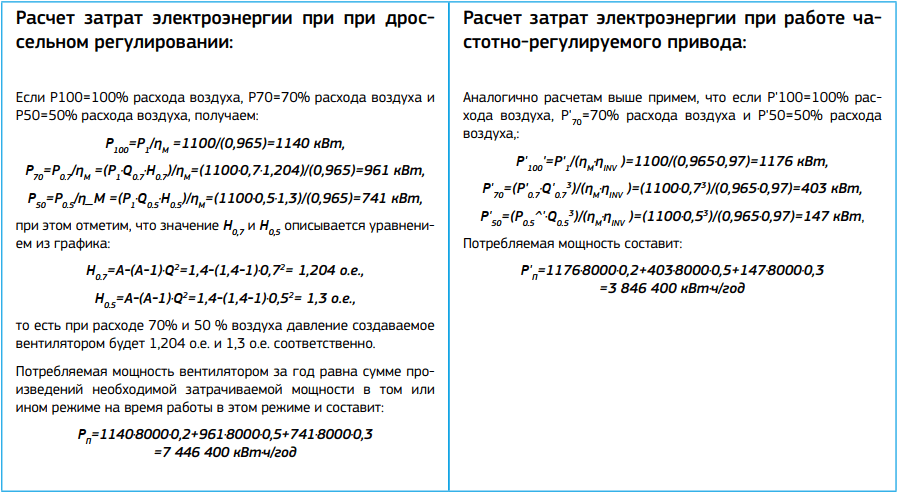
Экономия между работой под номинальной нагрузкой и работой с возможностью регулирования скорости вращения двигателя (работа совместно с ЧРП) равна:
7 446 400 кВт*ч/год — 3 846 400 кВт*ч/год= 3 600 000 кВт*ч/год
Учтем тариф на электроэнергию равным — 1 кВт*ч / 5,5 руб. Стоит отметить, что стоимость взята по первой ценовой категории и усредненному значению для одного из промышленных предприятий Приморского края за 2019 г.
Получим экономию в денежном выражении:
3 600 000 кВт*ч/год*5,5 руб/кВт*ч= 19 800 000 руб/год
Практика реализации подобных проектов позволяет с учетом затрат на эксплуатацию и ремонты, а также стоимости самих преобразователей частоты добиться срока окупаемости в 3 года.
Как показывают цифры, в экономической целесообразности внедрения ЧРП сомневаться не приходится. Однако одной экономикой эффект от их внедрения не ограничивается. ЧРП осуществляют плавный пуск двигателя, значительно уменьшая его износ, но об этом я расскажу в следующий раз.