Что такое силовой расчет
Динаимка машин и механизмов (силовой расчет).
Прямая и обратная задачи динамики машин.
Механическая работа, энергия и мощность.
ее мощность

Преобразование энергии в механизмах.
Рассмотрим как преобразуется поток механической энергии в идеальном механизме с жесткими звеньями (по идеальным механизмом здесь понимаем механизм, в котором не потерь энергии, т.е. КПД которого равно h =1). При этом входная мощность равна выходной Pвх = Pвых.
1. Механизм преобразующий вращательное движение во вращательное.

так как

2. Механизм преобразующий вращательное движение в поступательное.

так как

Аксиома освобождения от связей.

Классификация сил, действующих в механизмах.
Силы в кинематических парах плоских механизмов (без учета трения).
Сила, как векторная величина характеризуется относительно звеньев механизма тремя параметрами: координатами точки приложения, величиной и направлением. Рассмотрим с этих позиций реакции в КП плоских механизмов.
Силовой расчет типовых механизмов.
Постановка задачи силового расчета: для исследуемого механизма при известных кинематических характеристиках и внешних силах определить уравновешивающую силу или момент (управляющее силовое воздействие) и реакции в кинематических парах механизма.
Для определения числа неизвестных, а, следовательно, и числа независимых уравнений, при силовых расчетах необходимо провести структурный анализ механизма и определить число и классы кинематических пар, число основных подвижностей механизма, число избыточных связей. Чтобы силовой расчет можно было провести, используя только уравнения кинетостатики, необходимо устранить в нем избыточные связи. В противном случае, к системе уравнений кинетостатики необходимо добавить уравнения деформации звеньев, необходимые для раскрытия статической неопределимости механизма. Так как каждая связь в КП механизма соответствует одной компоненте реакции, то число неизвестных компонент реакций равно суммарному числу связей накладываемых КП механизма. Уравновешивающая сила или момент должны действовать по каждой основной подвижности механизма. Поэтому суммарное число неизвестных в силовом расчете определяется суммой связей в КП механизма и его основных подвижностей

где ns— число неизвестных в силовом расчете.
Кинетостатический силовой расчет типовых механизмов.
Рассмотрим механизм, состоящий из трех соединенных последовательно простых механизмов: зубчатой передачи, кулачкового механизма и четырехшарнирного рычажного механизма (рис. 4.7).

Представим этот механизм в виде комбинации типовых механизмов:


так как кинематические параметры aSi, e i механизма при кинетостатическом расчете заданы.
Определим подвижность, число избыточных связей в механизме, а также число неизвестных в силовом расчете:
т.е в нашем механизме неизвестно 6 компонент реакций, для решения задачи силового расчета необходимо составить 6 уравнений кинетостатики. Структурный анализ механизма показывает что механизм состоит из одного первичного механизма (звено 1 и стойка) и монады (структурной группы, состоящей из одного звена 2). Анализ начнем со второго звена, так как о нем больше известно.
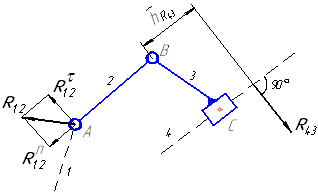
Расчетная схема для звена 2 приведена на рис. 4.9.

Уравнения равновесия для звена 2: векторное уравнение силового равновесия

уравнение моментов относительно точки В


Вначале решается уравнение моментов и определяется величина силы F21. Затем графически в масштабе m F, по векторному уравнению сил строится многоугольник (рис.4.10), из которого определяется величина и направление реакции F20.
2.1. Звено 1.
Расчетная схема для звена 1 приведена на рис. 4.11.
Уравнения равновесия для звена 1: векторное уравнение силового равновесия

уравнение моментов относительно точки А


Для звена 1 движущий момент Mд1рассчитывается по уравнению моментов, а величина и направление реакции F10 определяется графически (рис.4.12), построением плана сил в масштабе m F.
Примечание: Кулачковый механизм рассчитывается аналогично, поэтому его силовой расчет не рассматриваем.
Кинетостатический расчет четырехшарнирного механизма (метод проекций или аналитический).
Изобразим расчетную схему механизма и нанесем на нее все внешние силы и моменты (рис.4.12).

1. Определение подвижности механизма, числа избыточных связей в КП и числа неизвестных в силовом расчете.

2. Определение скоростей и ускорений звеньев и центров их масс.
3. Определение главных векторов и главных моментов сил инерции.

4. Кинетостатический расчет механизма.
4.1 Звено 5 (рис. 4.13).
Уравнения силового равновесия в проекциях на оси координат


и сумма моментов сил относительно точки L


4.2 Звено 4. (рис. 4.13).
Уравнения силового равновесия в проекциях на оси координат

и сумма моментов сил относительно точки Q

4.3 Звено 4. (рис. 4.14).

Уравнения силового равновесия в проекциях на оси координат

и сумма моментов сил относительно точки C

Из решения этой системы уравнений определяются реакции в КП и движущий момент Мд3
Примечание: Более подробно с силовым расчетом рычажных механизмов Вы познакомитесь на упражнениях и при выполнении 2-го домашнего задания.
Контрольные вопросы к лекции 4.
iSopromat.ru

Силовой расчет механизмов относится к решению первой задачи динамики. Как видно из содержания задач динамики, приведенного выше, первая задача включает в себя две части: изучение сил, действующих на звенья механизма; определение неизвестных сил при заданном законе движения на входе (эта вторая часть и есть задача силового расчета).
В целях дальнейшего понимания терминологии и систематизации материала целесообразно повторить известные из физики и теоретической механики сведения о силах, а также ввести некоторые новые (применяемые в теории механизмов и машин) понятия. С точки зрения решения задач динамики силы (в данном случае под силой понимается обобщенное понятие силового фактора – собственно сила или момент) можно классифицировать следующим образом:
а) по взаимодействию звена механизма с другими объектами. По этому признаку силы подразделяются на внешние и внутренние:
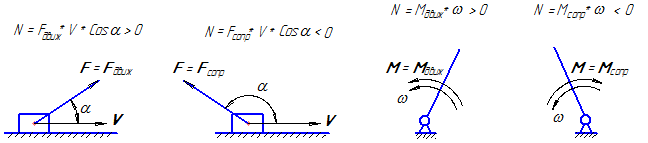
б) по мощности, развиваемой силой. По этому признаку силы делятся на силы движущие и силы сопротивления (рисунок 16):
В свою очередь силы сопротивления можно разделить на силы полезного сопротивления и силы вредного сопротивления:
Работа по преодолению этих сил переводится в тепло и рассеивается в пространство, поэтому коэффициент полезного действия любого механизма всегда меньше единицы;
в) силы веса – это силы взаимодействия звеньев механизма с гравитационным полем земли;
г) силы трения – силы, сопротивляющиеся относительному перемещению соприкасающихся поверхностей;
д) силы инерции – силы, возникающие при неравномерном движении звена и сопротивляющиеся его ускорению (замедлению). Сила инерции действует на то тело, которое заставляет ускоряться (замедляться) данное звено. В общем случае при неравномерном движении возникает сила инерции и момент сил инерции:
где
Fин – главный вектор сил инерции, приложенный в центре масс звена;
Mин – главный момент сил инерции;
m – масса звена;
Is – момент инерции звена относительно центра масс;
as – ускорение центра масс звена;
e – угловое ускорение звена.
Знак минус в формулах показывает, что сила инерции направлена противоположно ускорению центра масс звена, а момент сил инерции направлен противоположно угловому ускорению звена. Знак силы или момента учитывается только при установлении истинного направления силы или момента на расчетной схеме, а в аналитических вычислениях используется абсолютные их значения.
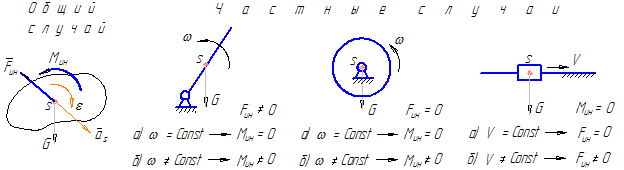
При силовом анализе механизмов могут встретиться различные случаи, когда один или оба силовых инерционных фактора могут иметь нулевое значение. На рисунке 17, приведенном выше, показаны некоторые случаи возникновения сил и моментов сил инерции при движении звеньев механизма.
Непосредственно силовой расчет сводится к определению неизвестных сил, действующих на звенья механизма. Как известно из теоретической механики для определения неизвестных сил используются уравнения статики.
Механизм же является неравновесной системой, т.к. большинство его звеньев имеет неравномерное движение, а точки, принадлежащие этим звеньям, движутся по сложным криволинейным траекториям (напомним: состояние равновесия – это состояние покоя или прямолинейного равномерного движения).
Поэтому для решения поставленной задачи применяется метод кинетостатики.
Метод кинетостатики основан на принципе Даламбера: если ко всем внешним силам, действующим на звенья механизма, добавить силы инерции и моменты сил инерции, то данный механизм будет находиться в состоянии статического равновесия. То есть это искусственный прием, приводящий неравновесную систему в состояние равновесия.
Искусственность приема заключается в том, что силы инерции прикладываются не к тем телам, которые заставляют двигаться звенья ускоренно (замедленно), а к самим звеньям.
Применив этот прием, в дальнейшем можно производить силовой расчет с использованием уравнений статики. Однако, чтобы решить задачу с помощью только уравнений равновесия, система должна быть статически определимой.
Условие статической определимости плоской кинематической цепи:
Для каждого звена, расположенного в плоскости, можно составить три независимых уравнения статики. Если в кинематической цепи имеется «n» подвижных звеньев, то в совокупности для этой цепи можно записать 3n независимых уравнений статики (равновесия). Эти уравнения используются для определения реакций в кинематических парах и неизвестных внешних сил.
На плоскости существуют кинематические пары только пятого и четвертого классов. Пары пятого класса представлены вращательной кинематической парой (шарниром) и поступательной парой (соединение ползуна с направляющей). В шарнире усилие между звеньями может передаваться в любом направлении, поэтому у реакции в шарнире неизвестными являются величина и направление (два компонента), т.е. для определения полной реакции во вращательной паре надо затратить два уравнения статики.
В первом приближении расчет ведется без учета сил трения. В этом случае перемещению ползуна вдоль направляющей ничто не препятствует. Перемещаться же поперек направляющей и поворачиваться ползун не может, поэтому в поступательной паре реакция направлена перпендикулярно направляющей и возникает реактивный момент, препятствующий повороту ползуна.
При силовом расчете обычно реактивный момент не определяют, а находят условную точку приложения реакции (произведение реакции на расстояние до ее условной точки приложения и есть реактивный момент). На определение реакции в поступательной паре также надо затратить два уравнения статики (определить два компонента – величину и точку приложения). Таким образом, на определение полной реакции в кинематической паре пятого класса необходимо затратить два уравнения статики.
Пары четвертого класса (высшие пары) на плоскости представляют соприкасающиеся между собой профили. В высшей паре усилие между звеньями передается по общей нормали к касающимся профилям (без учета сил трения). Поэтому в высшей паре четвертого класса реакция неизвестна только по величине (точка приложения реакции в точке контакта профилей, направление вдоль общей нормали к этим профилям).
Таким образом, для определения реакции в паре четвертого класса надо затратить одно уравнение статики (определить один компонент – величину реакции).
Если в кинематической цепи количество пар пятого класса равно Р5, то на определение реакций во всех этих парах надо затратить 2Р5 уравнений статики. На определение реакций во всех парах четвертого класса используется число уравнений, равное количеству этих пар Р4.
Таким образом, из 3n независимых уравнений статики 2Р5 уравнений используются для определения реакций в парах пятого класса и Р4 – для определения реакций в парах четвертого класса. Оставшиеся уравнения используются для определения неизвестных внешних сил, действующих на звенья механизма.
Пусть X – число уравнений, оставшихся для определения неизвестных внешних сил, тогда
но эта формула совпадает с формулой Чебышева для определения числа степеней свободы плоской кинематической цепи. В результате можно сформулировать условие статической определимости кинематической цепи следующим образом: кинематическая цепь статически определима в том случае, когда число неизвестных внешних сил, действующих на ее звенья, не превышает числа степеней свободы этой цепи.
Так как методы решения разработаны для групп Ассура, то необходимо сформулировать условие статической определимости группы Ассура. Группа Ассура – это кинематическая цепь, имеющая собственную степень свободы, равную нулю. Поэтому группа Ассура статически определима, если на ее звенья не действуют неизвестные внешние силы.
Уравнений в группе Ассура достаточно лишь для определения реакций в кинематических парах. Это обстоятельство предопределяет порядок силового расчета механизма:
При таком подходе на группы Ассура всегда будут действовать только известные внешние силы и из рассмотрения их равновесия будут определены реакции в кинематических парах, а из рассмотрения условий равновесия начальных звеньев будут определены оставшиеся реакции и неизвестные внешние силы.
Поскольку решение ведется по группам Ассура, то ниже рассматривается принцип силового расчета групп на примере групп второго класса.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
iSopromat.ru
В основу силового расчета механизмов по методу Н.Г. Бруевича положен принцип кинетостатики: если ко всем внешним действующим на звенья механизма силам добавить силы инерции и моменты сил инерции, то механизм будет находиться в состоянии статического равновесия.
Силовой расчет проводится по группам Ассура, начиная с наиболее удаленной от начального механизма. Заканчивается рассмотрением кривошипа, входящего в начальный механизм, для которого определяют уравновешивающую силу или уравновешивающий момент.
Для различных структурных групп Ассура разработаны специальные методы их силового исследования. В таблица 3 приведены рекомендации по анализу структурных групп II класса 1, 2, 3, 4, 5 видов.
Таблица 3 – Силовой анализ групп Ассура II класса

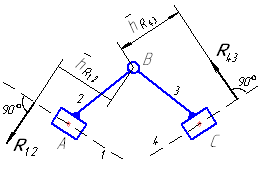
Рассмотрим последовательность силового расчета для заданного примера (рисунок 1). Все группы Ассура и кривошип начального механизма вычерчиваем отдельно (в масштабе) в том положении, которое они занимают на механизме в рассматриваемый момент времени.
Прикладываем к ним все силовые факторы, включая реакции в кинематических парах. Реакции во вращательных парах (шарнирах) неизвестны по величине и направлению, поэтому первоначально направляем их произвольно. Реакция в поступательной паре (ползуне) направлена перпендикулярно направляющей (т.к. вначале расчет ведется без учета сил трения), но неизвестны величина и точка приложения этой реакции.
Сила полезного сопротивления Fп.с. всегда направляется против скорости точки приложения этой силы, а момент сил полезного сопротивления Мп.с. – против угловой скорости звена приложения этого момента.
Группа (4,5) второго класса третьего вида
На звено 5 действует момент полезного сопротивления Мп.с., который направляется противоположно ω5 в данном положении механизма (если звено 5 движется поступательно, то действует сила полезного сопротивления Fп.с., которая направлена против скорости этого звена).
Одну из крайних реакций (в данном примере R65 в шарнире Е) раскладываем на две составляющие:

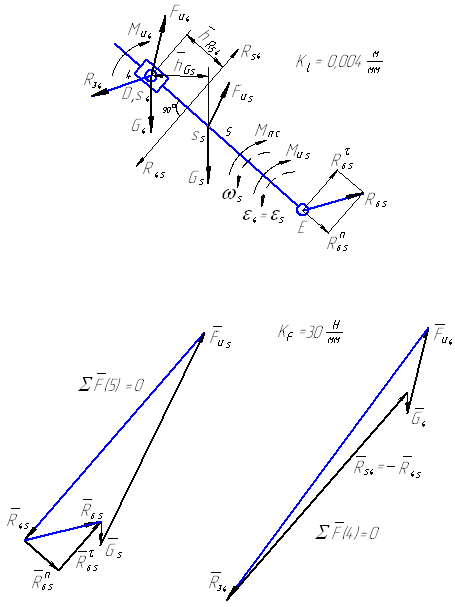
Рисунок 8 – К силовому расчету по методу Н.Г. Бруевича группы Ассура II класса 3 вида
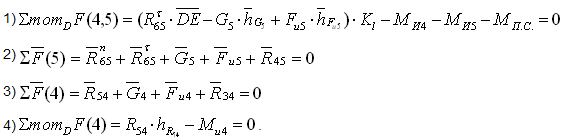
Решая первое уравнение, определяем R τ 65. Если реакция R τ 65 получится отрицательной, значит ее фактическое направление противоположно предварительно принятому. Второе и третье уравнения решаются графически построением планов сил в выбранном масштабе Kl (рисунок 8).
При этом во втором уравнении неизвестными являются величины реакций R n 65 и R45 при известном их направлении (R n 65||DE, R45⊥DE). Пересечением этих векторов при построении плана получаем их величины. В третьем уравнении R54=-R45, а вектор R34 неизвестен ни по величине, ни по направлению и при построении плана сил определяется как замыкающий вектор.
Решая четвертое уравнение, определяем точку приложения реакции R54 (истинное значение плеча hR54 в метрах).
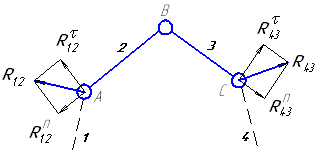
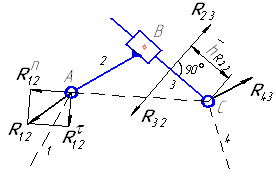
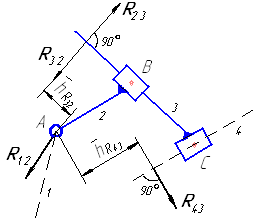
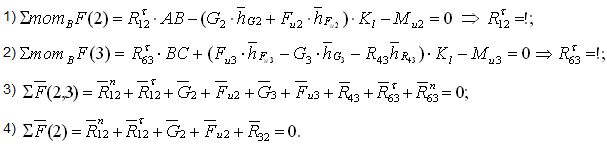
Группа (2,3) второго класса первого вида
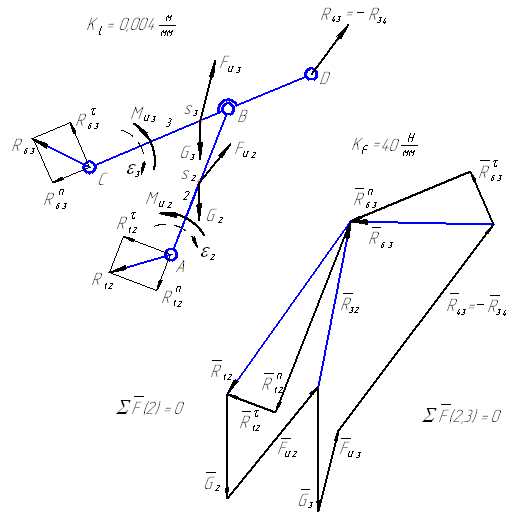
Рисунок 9 – Кинетостатика группы Ассура II класса 1 вида (звенья 2 и 3)
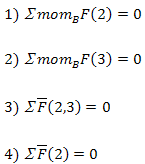
При решении этой группы (рисунок 9) также составляем четыре уравнения равновесия, из которых определяем реакции в кинематических парах (шарнирах) А, В и С. Реакция в шарнире D является теперь известной внешней силой (R43=-R34). Графическая часть решения приводится на рисунке 9.
Примечание: в данном примере план сил, действующих на звено 2, для определения реакции R32 представлен как часть общего плана для группы 2,3 (левая часть общего плана).
Завершаем силовой расчет по методу Н.Г. Бруевича рассмотрением равновесия кривошипа 1 (начальное звено анализируем последним). Для определения реакции R61 строим план сил по уравнению

Из уравнения 
определяем уравновешивающий момент Мур (в данном случае движущий момент, необходимый для преодоления всех сил, включая МП.С., и обеспечивающий при этом заданный закон движения на входе ω 1 = const).
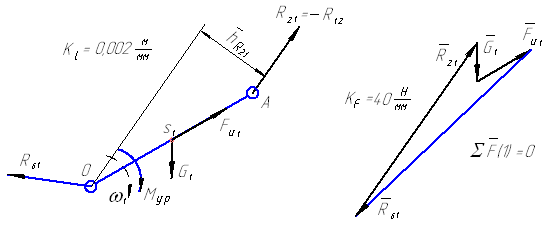
Рисунок 10 – К кинетостатике кривошипа 1
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах