Омические (резистивные) датчики. Контактные, потенциометрические (реостатные), тензорезисторные, терморезисторные.

Датчик — это устройство, преобразующее входное воздействие любой физической величины в сигнал, удобный для дальнейшего использования.
Омические (резистивные) датчики — приборы, принцип действия которых основан на изменении их активного сопротивления при изменении длины I, площади сечения S или удельного сопротивления р.
Кроме того, используется зависимость величины активного сопротивления от контактного давления и освещенности фотоэлементов. В соответствии с этим омические датчики делят на группы:
Контактные датчики — это простейший вид резисторных датчиков, которые преобразуют перемещение первичного элемента в скачкообразное изменение сопротивления электрической цепи. С помощью контактных датчиков измеряют и контролируют усилия, перемещения, температуру, размеры объектов, контролируют их форму и т. д. К контактным датчикам относятся:
Контактные датчики могут работать как на постоянном, так и на переменном токе. В зависимости от пределов измерения контактные датчики могут быть однопредельными и многопредельными. Последние используют для измерения величин, изменяющихся в значительных пределах, при этом части резистора R, включенного в электрическую цепь, последовательно закорачиваются.
Недостаток контактных датчиков — сложность осуществления непрерывного контроля и ограниченный срок службы контактной системы. Но благодаря предельной простоте этих датчиков их широко применяют в системах автоматики.
Реостатные датчики представляют собой резистор с изменяющимся активным сопротивлением. Входной величиной датчика является перемещение контакта, а выходной — изменение его сопротивления. Подвижный контакт механически связан с объектом, перемещение (угловое или линейное) которого необходимо преобразовать.
Наибольшее распространение получила потенциометрическая схема включения реостатного датчика, в которой реостат включают по схеме делителя напряжения. Делителем напряжения называют электротехническое устройство для деления постоянного или переменного напряжения на части.
Делитель напряжения позволяет снимать (использовать) только часть имеющегося напряжения посредством элементов электрической цепи, состоящей из резисторов, конденсаторов или катушек индуктивности. Переменный резистор, включаемый по схеме делителя напряжения, называют потенциометром.
Обычно реостатные датчики применяют в механических измерительных приборах для преобразования их показаний в электрические величины (ток или напряжение), например, в поплавковых измерителях уровня жидкостей, различных манометрах.
Датчик в виде простого реостата почти не используется вследствие значительной нелинейности его статической характеристики Iн = f(x), где Iн — ток в нагрузке.
Выходной величиной такого датчика является падение напряжения Uвых между подвижным и одним из неподвижных контактов. Зависимость выходного напряжения от перемещения х контакта Uвых = f(x) соответствует закону изменения сопротивления вдоль потенциометра. Закон распределения сопротивления по длине потенциометра, определяемый его конструкцией, может быть линейным или нелинейным.
Потенииометрические датчики, конструктивно представляющие собой переменные резисторы, выполняют из различных материалов — обмоточного провода, металлических пленок, полупроводников и т. д.
Тензорезисторы (тензометрические датчики) служат для измерения механических напряжений, небольших деформаций, вибрации. Действие тензорезисторов основано на тензоэффекте, заключающемся в изменении активного сопротивления проводниковых и полупроводниковых материалов под воздействием приложенных к ним усилий.
Термометрические датчики (терморезисторы) — сопротивление зависит от температуры. Терморезисторы в качестве датчиков используют двумя способами.
Способ 1. Температура терморезистора определяется окружающей средой; ток, проходящий через терморезистор, настолько мал, что не вызывает нагрева терморезистора. При этом условии терморезистор используется как датчик температуры и часто называется «термометром сопротивления».
Способ 2. Температура терморезистора определяется степенью нагрева постоянным по величине током и условиями охлаждения. В этом случае установившаяся температура определяется условиями теплоотдачи поверхности терморезистора (скоростью движения окружающей среды — газа или жидкости — относительно терморезистора, ее плотностью, вязкостью и температурой), поэтому терморезистор может быть использован как датчик скорости потока, теплопроводности окружающей среды, плотности газов и т. п.
В датчиках такого рода происходит как бы двухступенчатое преобразование: измеряемая величина сначала преобразуется в изменение температуры терморезистора, которое затем преобразуется в изменение сопротивления.
Терморезисторы изготовляют как из чистых металлов, так и из полупроводников. Материал, из которого изготавливаются такие датчики, должен обладать высоким температурным коэффициентом сопротивления, по возможности линейной зависимостью сопротивления от температуры, хорошей воспроизводимостью свойств и инертностью к воздействиям окружающей среды. В наибольшей степени всем указанным свойствам удовлетворяет платина; в чуть меньшей — медь и никель.
По сравнению с металлическими терморезисторами более высокой чувствительностью обладают полупроводниковые терморезисторы (термисторы).
Что такое резистивные датчики в применении ПЛК? Оставить комментарий
Резистивные датчики в ПЛК широко применяются для измерения давления, расстояния, уровня, положения механизма, перемещения, температуры, влажности и тому подобного. Работа датчиков основана на принципе переменного резистора (потенциометра): из-за механического воздействия на датчик, меняется его электрическое сопротивление. Пропустив электрический сигнал и измерив его падение на потенциометре, можно вычислить искомую физическую величину.
Фактически резистивный датчик — это обычный потенциометр, только «крутит» его не человек, а некая внешняя сила. Например, резистивные датчики положения надеваются на вал механизма, который вращается и тем самым изменяет положение ползунка потенциометра, а значит, и его сопротивление.
Впрочем, человек тоже может подключить к ПЛК потенциометр и использовать его для ручного ввода каких-нибудь уставок.
Резистивные датчики подключаются к аналоговому входу (AI) ПЛК по трехпроводной схеме.

Рисунок 1 — Подключение резистивного датчика к аналоговым входам ПЛК
Если аналоговый вход ПЛК не поддерживает подключение резистивных датчиков, то их можно подключить через соответствующий модуль расширения или модуль удаленного аналогового ввода. Например, модуль «ОВЕН МВ110» позволяет подключать резистивные датчики с диапазоном 0…900 Ом или 0…2000 Ом, а затем передавать по сети Modbus данные измерений на любой ПЛК.
Вам также будет интересно:
Резистивные датчики температуры. Принципы работы и характеристики
Работа РТД основана на свойстве металлов к изменению своего электрического сопротивления при изменении температуры. Известно, что все металлы изменяют свое сопротивление при изменении температуры. Этот факт и определил появление РТД.
Сопротивление отрезка провода прямо пропорционально его длине и обратно пропорционально площади поперечного сечения:

где p — удельное сопротивление материала.
Каждый металл имеет определенное и уникальное удельное сопротивление, которое может быть определено экспериментально. РТД изготавливают из металлов, сопротивление которых растет с температурой. В пределах ограниченного температурного диапазона удельное сопротивление линейно растет с ростом температуры:

Считая t 0 =0 °C, решим совместно уравнения 1 и 2. После приведения решения к стандартной линейной форме (y =mx +b) становится ясно, что изменение сопротивления в зависимости от температуры является линейной функцией с наклоном, равным
a :

Теоретически, любой металл может быть использован в качестве датчика температуры, однако идеальный металл должен иметь специфические характеристики:
Платиновый провод хрупок, но материал высокоустойчив к загрязнению и обладает только слегка нелинейной характеристикой dR/dt, поэтому платина и была выбрана для применения в РТД. К ее положительным характеристикам следует отнести химическую стабильность, возможность достаточно легкого получения материала в химически чистой форме, а также электрические свойства, которые имеют высокую повторяемость.
РТД изготавливают или из сплава IEC/DIN (американский стандарт) или из химически чистой платины (европейский стандарт). Отличие — в степени чистоты. Если стандарт IEC/DIN определяет, что датчик изготавливается из платины, которая преднамеренно загрязнена другими металлами платиновой группы, то платина, применяемая в датчиках, изготавливаемых по европейскому стандарту, имеет степень чистоты не менее 99,99%. Если датчики, сделанные из разных материалов, будут иметь сопротивление 100 Ом при 0 °C, то при 100 °C датчик, изготовленный из сплава IEC/DIN, будет иметь сопротивление 138,5 Ом, а датчик, изготовленный по европейскому стандарту, — 139,02 Ом.

Для платины стандарта IEC/DIN
a =0,00385 Ом/(Ом ·°C). Для платины европейского стандарта — 0,003926 Ом/(Ом ·°C)(максимально).
Зависимость между сопротивлением и температурой может быть приближенно описана уравнением Каллендар —Ван Дусена:

где T — температура (°C), R — сопротивление при температуре T, R 0 — сопротивление при температуре таяния льда,
a =постоянный коэффициент (определяет наклон функции R =F(T)при T =0 °C),
d — постоянный коэффициент,
b — постоянный коэффициент (
b =0 при T >0 °C).
Уравнение Каллендар — Вана Дусена может быть упрощено:

При по ожительных температурах поведение платинового РТД упрощается, так как коэффициент C становится равным нулю, и может быть определено как

Как было сказано выше,уравнения были получены Каллендар — Ван Дусеном из экспериментальных данных. Он использовал для калибровки три точки:0 °C и еще две произвольно выбранных по ожительных температуры:
Коэффициенты A, B, и C зависят от материала провода и его чистоты. Ничто не вечно, даже очень хорошие датчики иногда выходят из строя, и их необходимо менять. Для того чтобы эта операция была безболезненной для пользователя, датчики должны иметь идентичные характеристики, поэтому международный стандарт IEC 751 в целях взаимозаменяемости датчиков определил коэффициенты уравнения Каллендар — Ван Дусена, которые должен иметь любой выпускаемый РТД. Значения коэффициентов приведены ниже.
Коэффициенты для платиновых датчиков по стандарту IEC 751-2 (ITS90):
Для отдельно взятого датчика постоянные A, B и C могут слегка отличаться от стандартных, в зависимости от выбранных калибровочных температур и техно огии его изготовления. Поэтому при проведении точных измерений следует уточнить его характеристики у производителя.
Конструкция датчиков
Датчики изготавливают двух видов: провоочные или тонкопленочные.
Проволочные датчики наматывают очень тонким платиновым проводом на катушку до получения сопротивления равным 100 Ом. Потом катушка вставляется в керамическую оправку для предотвращения замыканий на корпус и обеспечения виброустойчивости. Этот процесс очень трудоемок, а вся работа выполняется вручную под микроскопом.
Тонкопленочные датчики изготавливаются методом осаждения тонкого слоя платины или ее сплавов на керамическое основание и следующей подгонки сопротивления резистора к требуемому значению. После этого элементы датчика для обеспечения влагоустойчивости покрываются стеклом или эпоксидной смолой. Преимуществом тонкопленочных датчиков по сравнению с прово очными является то, что по этой техно огии можно получить более высокоомные датчики при значительно меньших габаритах. Это ведет к увеличению разрешения на градус и, соответственно, минимизирует ошибки, вызываемые сопротивлением подводящих проводов. Например, выпускаются датчики, имеющие сопротивление 1000 Ом при 0 °С. Тонкопленочные датчики восприимчивы к деформации,и имеют максимальный температурный коэффициент 0,00385 Ом/(Ом ·°C).
Параметры датчиков
При выборе конкретного датчика должны анализироваться следующие его характеристики:
Схемы подключения
Используются двух-, трех-или четырехпроводные схемы подключения датчика к измерительному устройству. Они хорошо известны и поэтому не будут детально описываться. Но все же коротко рассмотрим основные аспекты их применения. Двухпроводная схема подключения используется там, где подводящие провода являются очень короткими и может быть допущена некоторая ошибка измерения. При трехпроводном подключении имеются три подводящих проводника вместо двух, что позволяет в некоторой степени уменьшить ошибки измерения, вносимые протеканием тока через подводящие провода. Четырехпроводная конфигурация может быть рекомендована для получения наилучших результатов измерения.
Ток возбуждения датчика проходит через одну пару проводов, а измерение сопротивления осуществляется через другую пару. Это исключает ошибку, вызванную разным сопротивлением подводящих проводов. Этот способ более дорог, чем двух-или трехпроводные конфигурации (особенно при длинных линиях связи), но это лучший способ обеспечения высокой точности измерения.
Еще хотелось бы привести достаточно удачную схему подключения двух РДТ, опубликованную на сайте caxapa.ru (см.рисунок). Здесь используется четырехпроводная схема подключения и логометрический метод измерения. По утверждению авторов, она обладает следующими характеристиками:

Следует отметить, что здесь точность и стабильность измерения определяются не только параметрами датчика, но и точностью и стабильностью резистора 1,00 кОм, включенного между REF+и REF-, поэтому рекомендуется использовать высокоточный и высокостабильный резистор типа С2-29С.
Саморазогрев
Как известно, для измерения сопротивления необходимо пропустить через него ток. Протекающий ток вызывает нагрев резистора, поэтому температура, измеряемая датчиком, будет всегда слегка выше фактической. Саморазогрев сильно зависит от среды, в которую помещен датчик. Например, саморазогрев датчика на воздухе может быть в 100 раз выше, чем в воде.
Точность, стабильность и повторяемость
Эти три термина часто путают, поэтому важно понять их различие.
Стандарт IEC 751 определяет два класса точности —класс «A » и класс «B »:
Класс «A »:t =±(0,15 +0,002 •|t |)
Класс «B »:t =±(0,30 +0,005 •|t |)
где:|t |— абсолютная температура в °C.
Класс «A » применяется для датчиков, работающих в температурном диапазоне от –200 до 650 °C, и только для трех-или четырехпроводной схемы подключения.
Класс «B » охватывает полный диапазон температур от –200 °C до 850 °C.
Стабильность — это способность датчика поддерживать свое неизменное сопротивление при постоянном входном воздействии. Физические или химические воздействия могут вызывать дрейф градуировки. Кроме этого, так как платина — материал достаточно жесткий, то провод на сердечнике или на подожке может расширяться или сжиматься, вызывая его деформацию и ухудшение стабильности. Дрейф, обычно указываемый изготовителями, составляет обычно 0,05 °C/год.
Повторяемость — это способность датчика иметь неизменную характеристику в течение длительного времени при идентичных условиях применения. Во многих случаях не требуется получения абсолютной точности, а все внимание обращается на стабильность и повторяемость характеристик датчика. Если, например, РТД в точке 100,00 °C всегда показывает 100,06 °C, то схема обработки всегда может легко компенсировать эту ошибку. Повторяемость характеристик датчиков исключительна, в большинстве случаев она составляет 0,05 °C в течение пяти лет.
Время выхода на режим
Время выхода на режим — это способность датчика реагировать на изменение температуры объекта. Оно зависит от тепловой массы датчика, а также близости и места распо ожения по отношению к измеряемому объекту, то есть от конкретной схемы измерения температуры. Например, датчик, помещенный в термокарман, реагирует на изменение температуры более медленно, чем тот же самый датчик, помещенный непосредственно в процесс. Технические требования определяют постоянную времени датчика как время, необходимое датчику для того, чтобы при ступенчатом воздействии температуры его показание составило 63% от амплитуды ступеньки. Время выхода на режим рассчитывается как при помещении датчика в воду, текущую со скоростью 0,2 м/с, и так и в воздух, текущий со скоростью 1 м/с.
Датчики и микроконтроллеры. Часть 1. Матчасть
В этом цикле я расскажу о датчиках — как о немаловажном элементе системы управления неким объектом или тех. процессом.
Все свое повествование я буду вести касаемо практических вопросов реализации цифровых систем управления на базе микроконтроллеров.
Введение
В системе управления технологической установкой снятие текущих показаний некоторой величины — температуры, влажности, давления, уровня жидкости, напряжения, тока и проч. осуществляется с помощью датчиков — устройств и механизмов, предназначенных для преобразования сигнала внешнего воздействия в форму, понятную системе управления. Например, датчик влажности генерирует электрический сигнал, пропорциональный текущему значению влажности воздуха.
Как правило, датчики используются не сами по себе, а входят в состав системы управления, обеспечивая сигнал обратной связи. 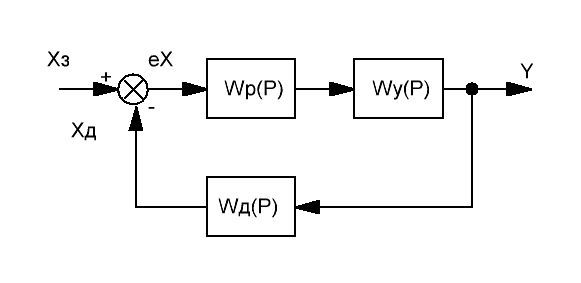
Рисунок 1. Типовая схема замкнутой системы регулирования
На рисунке 1 представлена типовая схема системы регулирования. Имеется сигнал задания Xз, который сравнивается с сигналом на выходе, получаемым с помощью датчика, имеющего передаточную функцию Wд(p). Ошибка управления подается на регулятор, который, в свою очередь, формирует сигнал управления исполнительным узлом, формирующим выходной сигнал Y.[1]
Простой пример — центробежный регулятор частоты вращения двигателя, где датчиком является платформа с шарами, которая, вращаясь, устанавливает то или иное положение топливной рейки. Заслонка, управляемая этой рейкой, регулирует количество топлива, подаваемое на двигатель. Сигналом задания будет являться требуемое значение скорости.
1.1 Классификация датчиков
Следует отметить, что в литературе встречается и альтернативный вариант классификации, когда Генераторные датчики определяются как Активные, а Параметрические — как Пассивные. Здесь и далее я руководствуюсь вариантом согласно справочнику Фарйдена.
2 Характеристики датчиков
Большинство датчиков имеют сложную процедуру преобразования измеряемой величины в электрический сигнал. Например, в тензорезисторном датчике давления измеряемая величина воздействует на чувствительный элемент, изменяя его сопротивление. После подачи сигнала возбуждения, падение напряжения на резисторе позволит косвенно определить его сопротивление и, на основании зависимости сопротивления от давления, вычислить измеряемую величину.
Для разработчика датчик представляет собой черный ящик с известными соотношениями сигналов между входами и выходами.
2.1 Диапазон измеряемых и выходных значений
Диапазон измеряемых значений показывает, какое максимальное значение входного сигнала датчик может преобразовать в выходной электрический сигнал, не выходя за пределы установленных погрешностей. Данные цифры всегда приводятся в спецификации на датчик, одновременно отображая возможную точность измерений в том или иной диапазоне.
Следует понимать, что одни датчики при подаче входного сигнала больше максимальных значений просто войдут в насыщение и будут возвращать неверные данные. Другие же датчики (например датчики температуры) могут выйти из строя. В дальнейшем, для каждого типа датчика будут даны свои рекомендации.
Диапазон выходных значений датчика — это минимальное и максимальное напряжение, которое датчик способен выдать при минимальном и максимальном внешнем воздействии. Так как мы рассматриваем датчики, преобразующие входной сигнал в электрический, то диапазон выходных значений датчика будет определяться в вырабатываемом им напряжении, или пропускаемом через него токе. Одной из наших задач при подключении датчика будет согласование выходного диапазона датчика со входным диапазоном измерительного тракта.
2.2 Передаточная функция — статические и динамические характеристики
При работе с датчиком требуется знать соотношение уровней сигналов на входе и выходе. Отношение Wд(p) = Y(p)/X(p) в операторном виде является передаточной функцией датчика и однозначно определяет характеристики датчика в статике и динамике.
Уравнение Y(p) = Wд(p)*X(p) в реальной плоскости, т.е. функция Y = f(x) будет являться статической характеристикой
Статическая характеристика может быть линейно и будет определяться как:
 (1)
(1)
Где a – наклон прямой, определяемый чувствительностью датчика и b – постоянная составляющая(т.е. уровень выходного сигнала при отсутствии сигнала на входе)
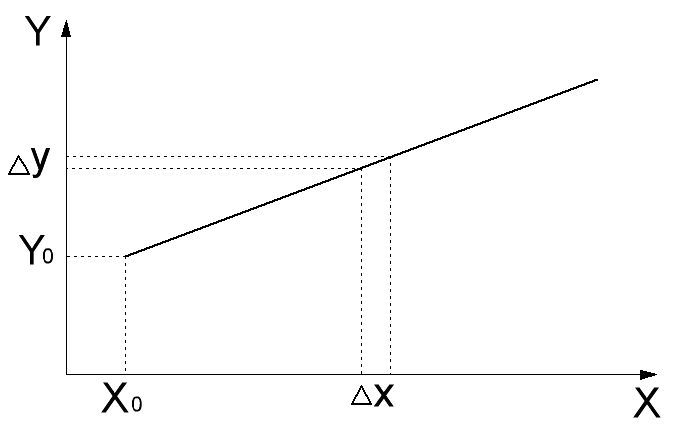
Рисунок 2. Линейная зависимость
Помимо датчиков с линейной зависимостью, могут быть датчики с логарифмической зависимостью, с уравнением вида
 (2)
(2)
Экспоненциальной:
 (3)
(3)
Или степенной:
 (4)
(4)
Где k – постоянное число.
Существуют датчики с более сложной характеристикой. Но на то есть документация.
Однако, передаточная функция раскрывает и то, какими свойствами обладает датчик в динамике, т. е. насколько быстро и точно отрабатывает датчик выходной сигнал при быстром изменении входной величины. Практически каждый реальный датчик имеет в себе накопитель энергии — конденсатор, массу и т. п. Рассмотрим поведение датчика, динамические характеристики которого описываются уравнением первого порядка:
 (5)
(5)
В теории автоматического управления существует два тестовых входных сигнала. Это единичная функция — подача в нулевой момент времени единицы, и дельта-функция — подача сигнала бесконечной амплитуды и бесконечно малой длительности.
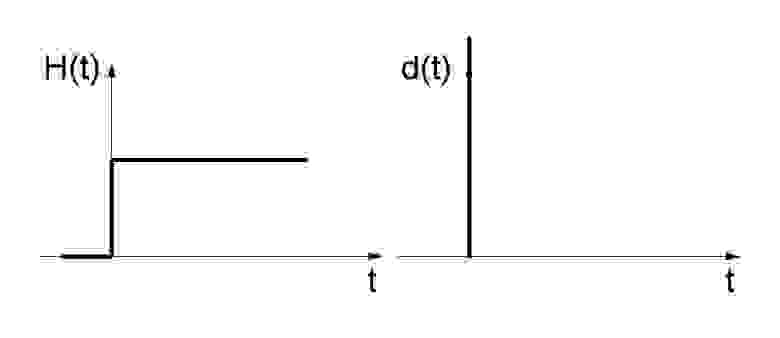
Рисунок 3. Единичная и дельта функции
Безынерционный, то бишь идеальный датчик в точности повторит форму входного сигнала. Реальный датчик, описанный формулой (5) выдаст следующую реакцию:
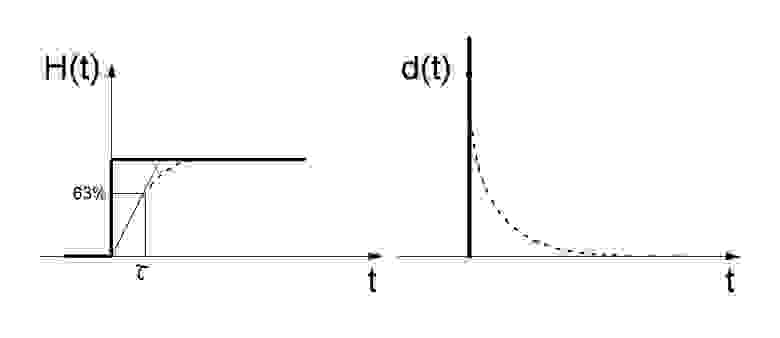
Рисунок 4. Реакция апериодического звена первого порядка на тестовые сигналы
Следует отметить, что значение на выходе датчика будет соответствовать поданному на входе только после завершения переходного процесса, которое будет длиться 3-4τ, где τ — постоянная времени нашего звена. При t=1τ, выходное значение достигнет 
Нетрудно посчитать, что при t = 2τ выходное значение составит 86%, а при t = 3τ — 95% и переходный процесс будет считаться завершенным.
Таким образом нужно понимать, что, например, тот же датчик температуры будет реагировать на изменение температуры окружающей среды с некоторым запаздыванием из-за того, что между датчиком и окружающей средой имеется корпус, который должен поглотить тепло и нагреться. На это требуется время.
Разумеется, инерционные датчики могут описываться более сложными уравнениями, например представляться апериодическими звеньями второго порядка, иметь задержку реакции и т. д. Особенности поведения таких звеньев подробно описаны в [1].
2.3 Точность, нелинейность
Одной из важных характеристик датчика является его точность в диапазоне измеряемых величин. Выходной сигнал датчика соответствует значению измеряемой величины с некоторой достоверностью, называемой погрешностью.
Например, датчик температуры имеет точность ±2 градуса. Это означает, что при реальной температуре измеряемого объекта в 100 градусов, допустимые показания данного датчика температуры находятся в пределах 98 – 102 градусов.
Погрешность датчика бывает разной.
Различают аддитивную и мультипликативную погрешность.
Аддитивная погрешность постоянна во всем диапазоне измерений. 
Рисунок 5. Аддитивная погрешность
Мультипликативная линейно зависит от уровня измеряемой величины: 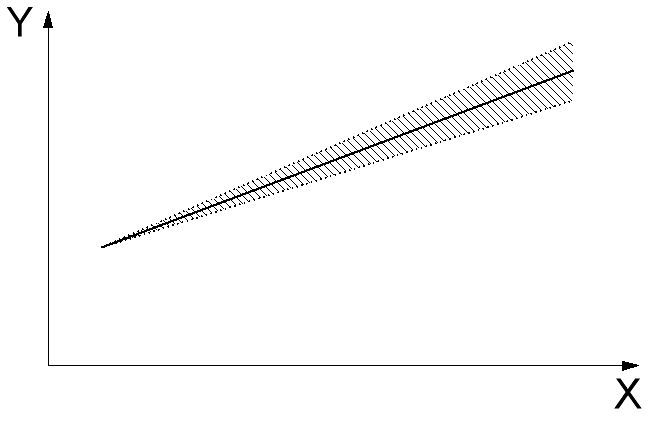
Рисунок 6. Мультипликативная погрешность
Кроме того, существует нелинейность датчика в измеряемом диапазоне. В зависимости от текущего диапазона измерения, коэффициент наклона передаточной функции изменяется в некоторых пределах. При этом, в спецификации указываются либо кривые изменения точности по диапазону, либо худшие показатели нелинейности в том или ином диапазоне.
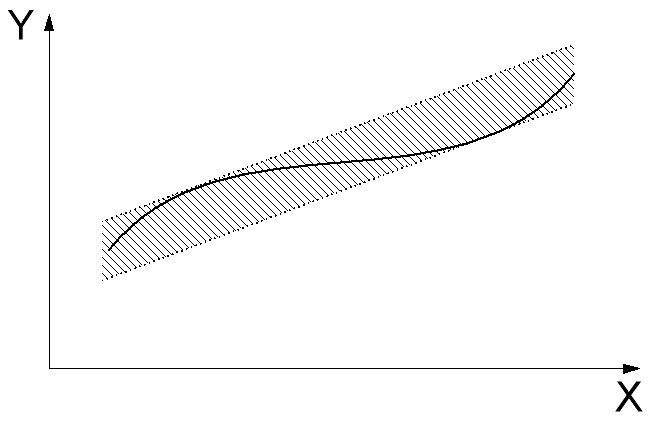
Рисунок 7. нелинейность датчика
Кроме того, некоторые датчики имеют эффект гистерезиса, когда для одного и того же входного сигнала после возрастания и убывания значения выходного сигнала получаются разными. Типичной причиной гистерезиса является трение и структурные изменения материалов. Наибольшему эффекту гистерезиса подвержены датчики на основе ферромагнитных материалов.
Для повышения точности и компенсации аддитивной и мультипликативной погрешности может производиться процесс калибровки датчика. Например, для линейного датчика необходимо с заведомо известной точностью определить показания в двух точках, находящиеся на разных концах рабочего диапазона. Для некоторых датчиков данные калибровки могут приводиться в паспорте на каждый конкретный экземпляр. Для проведения процедуры калибровки можно воспользоваться более точной аппаратурой, можно воспользоваться эталоном (например черное тело, эталонный килограмм и т. п.). Точность после калибровки естественно не сможет превышать точность эталона.
2.4 Чувствительность датчика, разрешающая способность и мертвая зона
Мертвая зона датчика — это нечувствительность датчика в определенном диапазоне входных сигналов. В пределах этой зоны выходные показания некорректны.
Для примера на рисунке 2 показания выходной величины для всех значений от 0 до x0 не определены. Такой особенностью грешат, например, некоторые датчики тока, имеющие нулевое напряжение на выходе при токах меньших, к примеру, 10мА.
Во всем остальном диапазоне имеет место определенная чувствительность датчика, т. е. насколько силен прирост выходного сигнала на изменение входного сигнала. т. е. чувствительность определяется следующей формулой: 
Для линейного датчика, чувствительность будет постоянной на всем измеряемом диапазоне.
Разрешающая способность показывает, насколько малое изменение измеряемой величины способно вызвать изменение выходного сигнала. Например, какой-нибудь инкрементальный датчик положения имеет разрешающую способность в 1 градус. Аналоговые датчики обладают бесконечно большим разрешением, так как в их выходном сигнале нельзя определить отдельных ступеней его изменения.
3 Способ подключения датчиков
В зависимости от типа датчика, подключается он к измерительному тракту по-разному.
Подключение пассивного датчика
Так как пассивный датчик без посторонней помощи в ответ на внешнее воздействие самостоятельно вырабатывает для нас электрический сигнал, нам этот сигнал нужно считать.
В зависимости от того, будет ли наш датчик источником тока или источником напряжения, способ подключения будет отличаться.
К примеру, термопара является источником напряжения — напряжение на выходе не зависит от величины выходного тока (в разумных пределах конечно). Наша задача — измерить вырабатываемую ЭДС. Так как измерительный тракт будет иметь некоторое конечное сопротивление, схема подключения будет следующей: 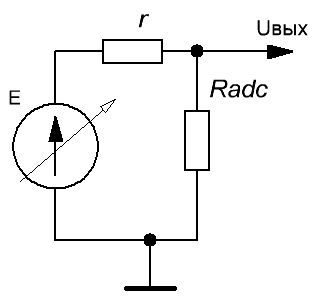
Рисунок 8. Подключение источника напряжения к АЦП
Если Radc будет много больше внутреннего сопротивления r, тогда падение напряжения на нем будет стремиться к нулю и напряжение на входе АЦП будет стремиться к значению ЭДС.
Во второй части я подробно рассмотрю термопару, как один из самых точных и быстродействующих датчиков.
Другой случай, если наш датчик является источником тока, т.е генерируемое им напряжение зависит от пропускаемого через нагрузку тока.
Подключение датчика аналогично: 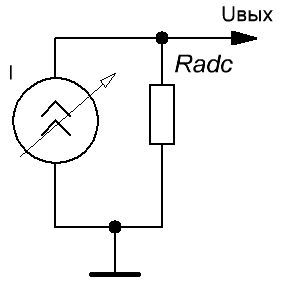
Рисунок 9. Подключение источника тока к АЦП
Однако, сопротивление нагрузки источника тока теперь должно стремиться к нулю. Для этого, датчик шунтируется резистором необходимого сопротивления, превращая тем самым, источник тока в источник напряжения: 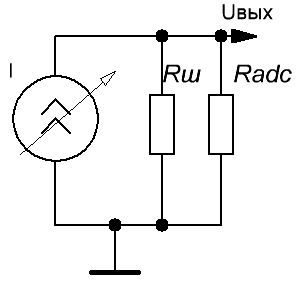
Рисунок 10. Правильное подключение источника тока к АЦП
Сопротивление резистора Rш рассчитывается как частное от деления максимального напряжения, подаваемого на вход АЦП на максимальный ток, который способен выдать датчик 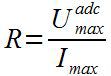
Наиболее яркий представить такого датчика — датчик тока.
ВНИМАНИЕ: датчики, имеющие схему замещения в виде источника тока, следует обязательно шунтировать сопротивлением и не допускать обрыва цепи шунтирования при наличии сколь угодно малого входного воздействия. В противном случае, тот же датчик тока генерирует на свободных клеммах вторичной обмотки напряжение в киловольты до пробоя схемы измерения или самого датчика. Современные датчики тока тестируют на напряжении 1кВ и более, так что получить на выходе 2-3кВ, а еще попасть в них пальцем — не самая сложная задача.
Подключение активного датчика
Рассмотрим активные датчики, представляющие собой переменное сопротивление. В частности это терморезисторы, тензорезисторы и прочие подобные датчики. Чтобы сопротивление датчика измерить, его необходимо подключить к источнику тока и определить падение напряжения на нем:

Рисунок 11. Подключение датчика к нерегулируемому источнику тока
Источник тока вырабатывает ток постоянного значения известной величины. Тогда, выходное напряжение будет определяться по формуле:
 (7)
(7)
Например, рассчитаем выходное значение напряжения при токе источника 10мА если наш датчик изменяет сопротивление от 0,1кОм до 1 кОм. Тогда максимальное выходное напряжение будет равно  (8)
(8)
Что вполне соответствует требуемому значению напряжения для аналоговой системы управления на базе операционных усилителей.
Где взять источник тока? Бывает так что он встроен в сам микроконтроллер. Например в микроконтроллерах ADuCM360/361 есть два встроенных источника тока 0,01-1мА. Правда там у них диагностическая задача — подавая малый ток через цепи датчика можно убедить в его наличии и исправности.
Конечно, нам привычнее использовать источник напряжения с делителем: 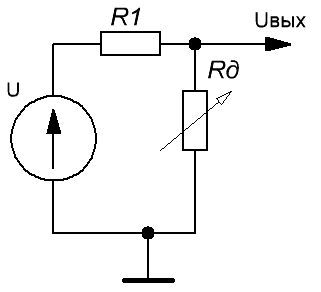
Рисунок 12. Подключение датчика к источнику напряжения с делителем
Если говорить на чистоту, то цепочка U-R1 образует тот же самый источник тока, только его параметры зависят от нагрузки — Rд. Напряжение на выходе будет определяться по следующей формуле:
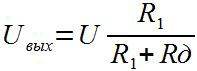 (9)
(9)
И тут всплывает главная проблема такого метода — от сопротивления нашего датчика в знаменателе не избавишься никак и показания становятся нелинейными, в отличие, кстати, от первого варианта.
С другой стороны, максимальное выходное напряжение у нас ограничено входными цепями измерительного устройства. Например, на вход микроконтроллера с питанием 5В необходимо подать напряжение, к примеру, не более 2,5В. Отмечу, что если максимально возможное напряжение, подаваемое на вход АЦП меньше напряжения питания, то мы сможем его туда подать.
Если наш датчик изменяет сопротивление от 0,1кОм до 1 кОм, то примем сопротивление резистора R1 равное верхней границе сопротивления датчика. Тогда Uвых сможет изменяться в пределах от 1/11Uвх до 1/2Uвх. В абсолютных цифрах данного примера — от 0,45 до 2,5В. И такими значениями мы используем (2,5-0,45)/2,5 = 82% всего диапазона АЦП, что довольно неплохо.
Еще датчик можно воткнуть в состав измерительного моста и измерять разницу напряжений в его плечах:
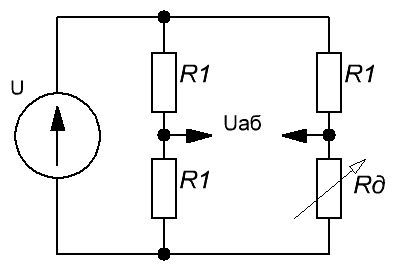
Рисунок 13. Датчик в составе измерительного моста
В этом случае мы работаем с дифференциальным АЦП, измеряя разность потенциалов Uab. Она будет равна: 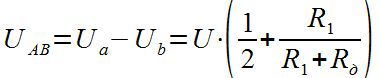 (10)
(10)
Причем сопротивление резистора R1 может быть таким, чтобы Uab могло быть и отрицательным. Существуют датчики, внутренняя схема которых уже представляет собой балансный мост с необходимыми характеристиками. Позднее я рассмотрю примеры таких датчиков.
Существуют более удобные в использовании датчики. Они выдают необходимый аналоговый сигнал и без танцев с резисторами. Например, аналоговый датчик влажности HIH-4010-004 — трехвыводной корпус, 5В питание, линейный выход. Подключается это чудо так:
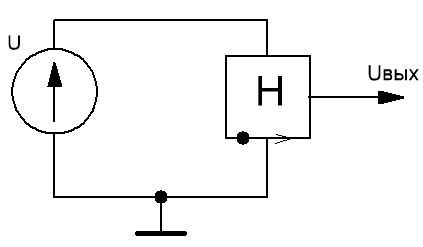
Рисунок 14. Подключение датчика влажности HIH-4010-004
Два провода к источнику опорного напряжения, выход — к АЦП микроконтроллера.
Подключение цифровых датчиков по стандарту 1-Wire
1-Wire это двунаправленная низкоскоростная цифровая шина передачи данных, требующая всего два провода — информационный провод и землю. Шина достаточно проста в использовании, поддерживает паразитное питание устройств от линии и позволяет подключать параллельно множество однотипных устройств вроде датчиков температуры(всеми любимыми DS18B20), или микросхем идентификации (iButton).
Паразитное питание организовывается следующим образом:
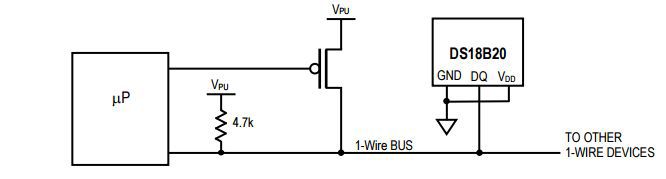
Рисунок 15. Паразитное питание устройств шины 1-Wire
А это обычное активное питание устройства, когда до источника рукой подать. 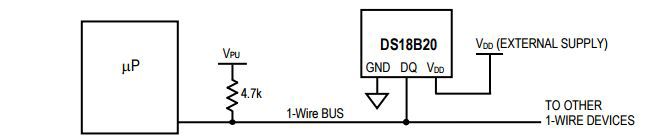
Рисунок 16. Питание устройства 1-Wire от внешнего источника
Количество подключенных параллельно датчиков фактически ограничено лишь параметрами линии.
Возможно горячее подключение и идентификация на ходу. Причем вычислительная сложность алгоритма идентификации O(log n)
Более подробно с этим протоколом мы поработаем во второй части.
А пока, про сам протокол можно почитать по классической ссылке: http://datasheets.maximintegrated.com/en/ds/DS18B20.pdf
Подключение цифровых датчиков по стандарту I2C(Twi)/SMBus
Если 1-Wire требовала один провод данных, то эта шина, исходя из названия Two-Wire Bus — два.
Один из проводов — SCL будет тактирующим, по второму — SDA, полудуплексом будут передаваться данные.
Шина с открытым коллектором, следовательно обе линии необходимо подтянуть к питанию. Датчик будет подключаться следующим образом:

Рисунок 17. Подключение датчиков по I2C
Общее количество устройств, которые можно подключить к шине I2C — 112 устройств при 7-разрядной адресации. Каждому устройству на деле выделяется два последовательных адреса, младшим битом выставляется режим — на чтение или запись. Есть строгое требование по емкости шины — не более 400пФ.
Общеупотребительные значения скоростей — 100 кбит/сек и 10 кбит/сек, хотя последние стандарты допускают и скоростные режимы в 400 кбит/сек и 3.4мбит/сек.
Шина может работать как с несменяемым мастером, там и с передачей флага.
Огромное количество информации по протоколу можно найти по этой ссылке: http://www.esacademy.com/en/library/technical-articles-and-documents/miscellaneous/i2c-bus.html
Подключение цифровых датчиков по стандарту SPI
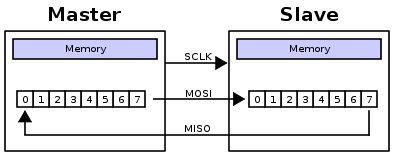
Рисунок 18. подключение по SPI и суть передачи
Каждое устройство в цепи содержит свой сдвиговый регистр данных. С помощью сигналов тактирования, спустя 8 тактов содержимое регистров меняется местами, тем самым, осуществляя обмен данными.
SPI — Самый скоростной из представленных интерфейс передачи данных. В зависимости от максимально-возможных частот тактирования скорость передачи данных может составлять 20, 40, 75 мбит/сек и выше.
Шина SPI позволяет подключать устройства параллельно, но здесь возникает проблема — каждому устройству требуется своя линия CS до процессора. Это ограничивает общее количество устройств на одном интерфейсе.
Главная сложность в настройке SPI — это установить полярность сигнала тактирования. Серьезно. Настроить SPI не просто, а очень просто.
Коротко и ясно об SPI с описанием периферийных модулей SPI для AVR и MSP430 можно прочитать здесь http://www.gaw.ru/html.cgi/txt/interface/spi/index.htm
4 Снятие показаний с датчиков
Пора бы уже прочесть с наших датчиков хоть какую-то информацию.
В зависимости от способа подключения датчика и его типа возможны различные способы снятия показаний. Следует отметить, что некоторые датчики, например цифровые датчики, или датчики состава газа, требуют предварительного запуска режима измерения, который может длиться некоторое время.
Таким образом, процесс измерения состоит из двух тактов — такт измерения данных и такт снятия данных. При организации программы можно пойти по одному из следующих вариантов: 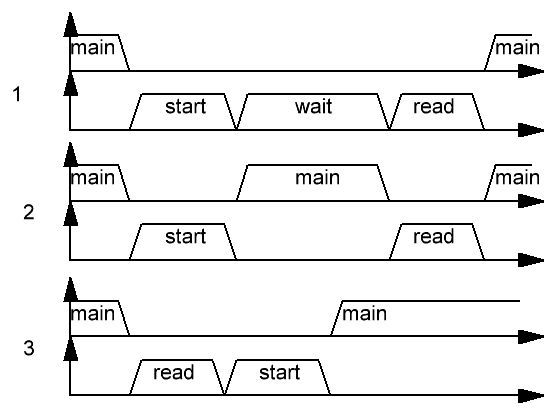
Рисунок 19. Процесс считывания показаний с датчика
Рассмотрим каждый вариант по отдельности и набросаем скелеты:
Вариант 1. запустили режим измерений, подождали, считали.
Вариант притягателен своей простотой, однако за ней кроется проблема — во время ожидания выполнения измерений микроконтроллер нагло простаивает, не выполняя задач. В большинстве систем автоматики такой режим — непозволительная роскошь.
В коде это будет выглядеть следующим образом:
Вариант 2. запустили режим измерений, вернулись к другим задачам, по прошествии времени сработало прерывание, считали данные.
Один из лучших вариантов. Но наиболее сложный:
Выглядит неплохо. позволяет варьировать время между циклами измерений и циклами считывания. например, датчик состава газов должен успеть остыть после предыдущих измерений, либо успеть нагреться во время измерений. Это разные периоды времени.
Вариант 3: Считали данные, запустили новый виток.
Если датчик позволяет после считывания данных запускать новый цикл измерений, то почему бы и нет — сделаем все наоборот.
Отличный способ сэкономить время. и знаете что — такой метод отлично работает и без прерываний. Цифровые датчики хранят вычисленное значение вплоть до отключения питания.А с учетом того, что считывать сигналы с датчика влажности ввиду его инерционности в 15 секунд часто и не требуется, можно и вовсе сделать так:
Может быть и такой вариант, что наш датчик самостоятельно запускает новый цикл измерений и потом с помощью внешнего прерывания он сообщает о завершении измерений. Например, АЦП можно настроить на автоматический режим считывания данных с частотой N Гц. С одной стороны, в обработчике прерывания будет достаточно реализовать только процесс считывания новых данных. С другой стороны, можно воспользоваться прерыванием АЦП с режимом Прямого Доступа к Памяти — ПДП(DMA). В этом случае по сигналу прерывания периферийный модуль АЦП на аппаратном уровне самостоятельно скопирует данные в определенную ячейку памяти в ОЗУ, тем самым обеспечивая максимальную скорость обработки данных и минимальное воздействие на рабочую программу (не надо уходить в прерывание, вызывать обработчик и проч.).
Но использование DMA сильно выходит за рамки данного цикла.
К сожалению, первый метод поголовно используется в библиотеках и примерах для Arduino, не позволяет этой платформе правильно использовать ресурсы микроконтроллера. Зато он проще в написании и отладке.
4.1 Работа с АЦП
Имея дело с аналоговыми датчиками имеем дело с АЦП. В данном случае рассматривается АЦП встроенный в микроконтроллер. Так как АЦП является по сути тем же датчиком — преобразует электрический сигнал в информационный — для него справедливо все что описано выше в разделе 2. Главными характеристиками АЦП для нас являются его эффективная разрядность, чувствительность, опорное напряжение и быстродействие. При этом, выходным значением АЦП преобразования будет некоторое число в выходном регистре, которое необходимо перевести в абсолютное значение в единицах измеряемой величины. В дальнейшем, для отдельных датчиков будут рассмотрены примеры таких расчетов.
4.1.1 Опорное напряжение
Опорное напряжение АЦП — это напряжение, которому будет соответствовать максимальное выходное значение АЦП. Опорное напряжение подается от источника напряжения, как встроенного в микроконтроллер, так и внешнего. От точности этого источника зависит точность показаний АЦП. Типовое опорное напряжение встроенного источника равняется напряжению питания или половине напряжения питания микроконтроллера. Могут быть и другие значения.
Например, таблица возможных значений опорного напряжения для микроконтроллера Atmega1280: 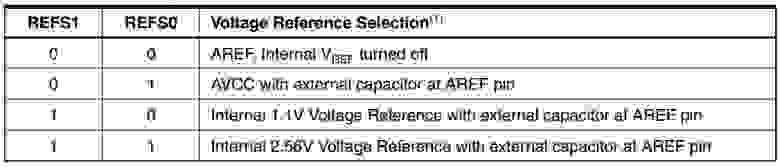
Рисунок 20. Выбор опорного напряжения для АЦП микроконтроллера Atmega1280
4.1.2 Разрядность АЦП и чувствительность
Разрядность АЦП определяет максимальные и минимальные значения в выходном регистре при минимальном и максимальном входном воздействии электрического сигнала.
Следует отметить, что максимальная разрядность АЦП может не соответствовать его эффективной разрядности.
Часть младших разрядов может быть отдана на шум. Обратимся к датащиту на микроконтроллер ADuCM360, имеющему 24-разрядный АЦП с эффективной разрядностью 14 бит:

Рисунок 21. Назначение битов регистра данных АЦП
Как видно из рисунка, в 32-разрядном регистре, часть выделяется на знак, часть на нули и часть на шум. И лишь 14 разрядов содержат данные, имеющие указанную точность. В любом случае, эти данные всегда указываются в документации.
От эффективной разрядности АЦП зависит его чувствительность. Чем больше промежуточных ступеней выходного напряжения, тем выше будет чувствительность.
Допустим, опорное напряжение АЦП Uоп. Тогда, N-разрядный АЦП, имея 2N возможных значений, имеет чувствительность 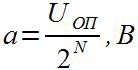 (11)
(11)
Таким образом, для 12-разрядного АЦП и опорного напряжения в 3,3В его чувствительность составит 3,3/4096 = 0,8мВ
Так как наш датчик также обладает определенной чувствительностью и точностью, будет неплохо, если АЦП будет обладать лучшими показателями
4.1.3 Быстродействие АЦП
Быстродействие АЦП определяет, насколько быстро считываются показания. Для АЦП последовательного приближения требуется определенное количество тактов, чтобы оцифровать уровень входного напряжения. Чем больше разрядность, тем требуется больше времени, соответственно, если к концу измерения уровень сигнала успевает измениться, это отразится на точности измерения.
Быстродействие АЦП измеряется в количестве семплов данных в секунду. Оно определяется как частота сигнала тактирования АЦП, деленная на требуемое для измерения число таков. Например, имея частоту тактирования АЦП в 1МГц и 13 тактов для снятия показаний, быстродействие АЦП будет равно 77 килосемплов в секунду. Для каждого варианта разрядности возможно рассчитать свое быстродействие. В технической документации обычно указывается максимально-возможная частота тактирования АЦП и его максимальное быстродействие при той или иной разрядности.
4.2 Цифровые датчики
Главное преимущество цифровых датчиков перед аналоговыми — они предоставляют информацию об измеряемой величие в готовом виде. Цифровой датчик влажности вернет абсолютное значение влажности в процентах, цифровой датчик температуры — значение температуры в градусах.
На этом я закончу общий материал. В следующей части мы рассмотрим датчики HVAC с примерами.
После датчиков пойдет рассмотрение исполнительных устройств — там довольно много интересного с точки значения теории автоматического управления, а потом доберемся и до синтеза и оптимизации регулятора всего этого безобразия.
UPD: Выражаю благодарность amartology, Arastas и Stross за справедливые замечания по статье. Добавил материал по 2 и 4 разделам и пояснил некоторые спорные моменты.